|
|
@@ -0,0 +1,484 @@
|
|
|
1
|
+title: Trackball
|
|
|
2
|
+description: 3D printed mouse replacement with Raspberry Pi Pico and PMW3360
|
|
|
3
|
+parent: input_devices
|
|
|
4
|
+git: https://git.xythobuz.de/thomas/Trackball
|
|
|
5
|
+github: https://github.com/xythobuz/Trackball
|
|
|
6
|
+date: 2023-02-12
|
|
|
7
|
+comments: true
|
|
|
8
|
+---
|
|
|
9
|
+
|
|
|
10
|
+<!--% backToParent() %-->
|
|
|
11
|
+
|
|
|
12
|
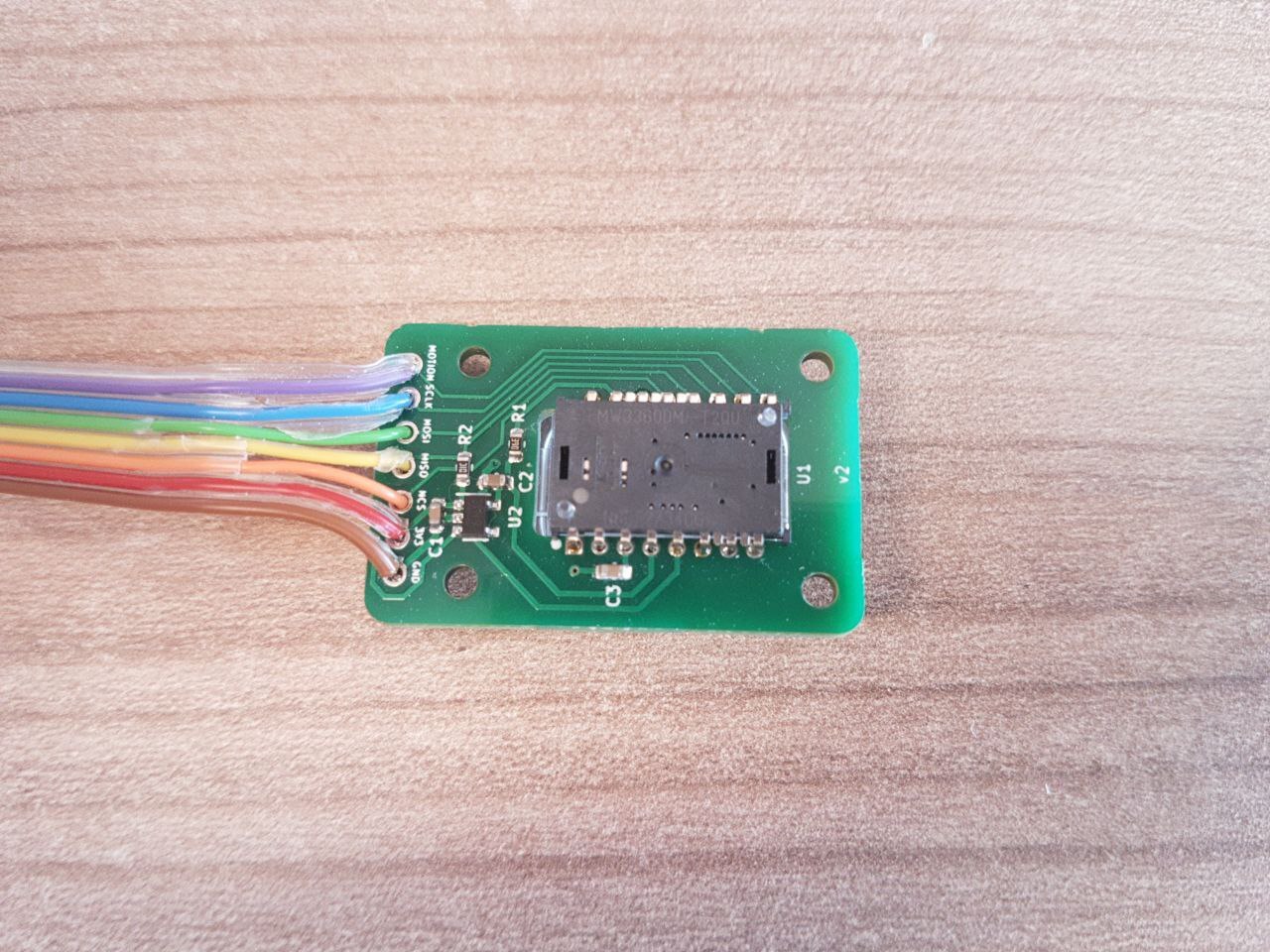
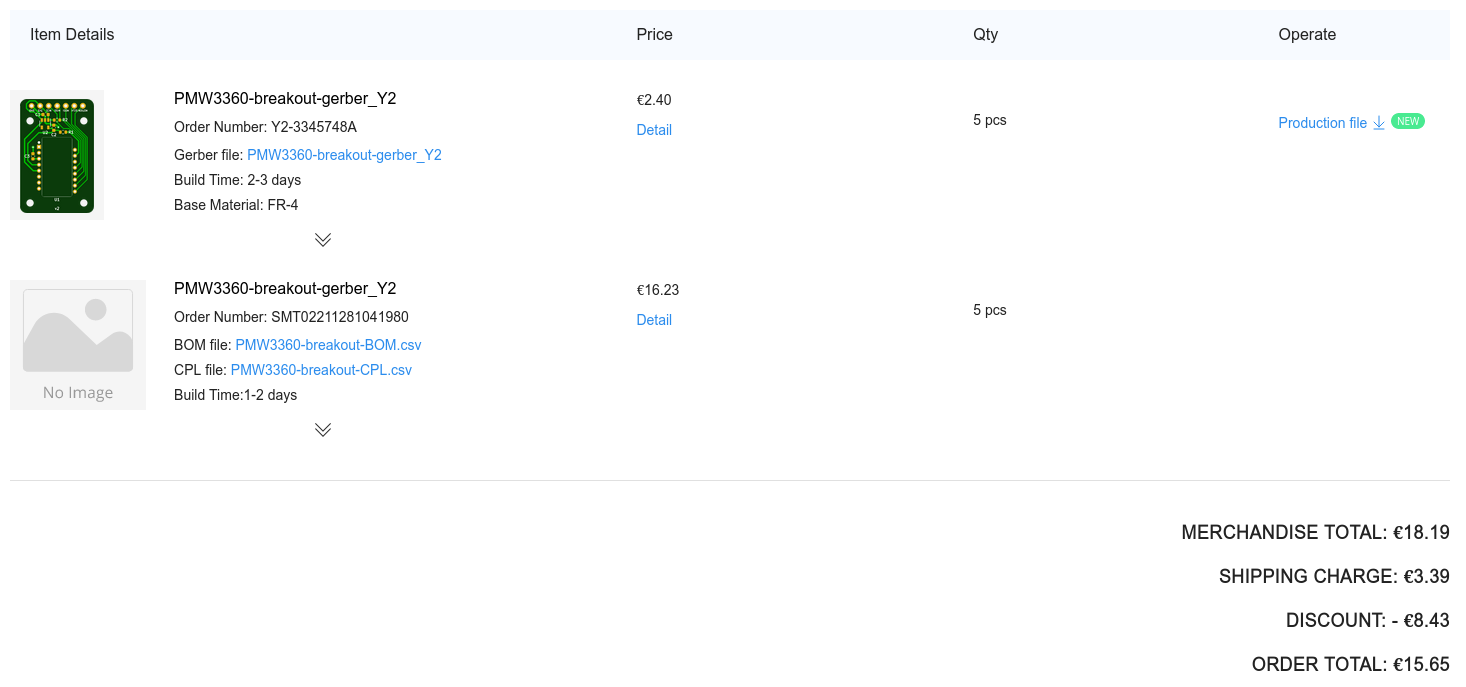
+For some years I have been using Trackballs from Logitech, first the [M570](https://amzn.to/3XhSuRO) and then the [MX Ergo](https://amzn.to/3xdp3pd).
|
|
|
13
|
+But of course we could also build our own!
|
|
|
14
|
+
|
|
|
15
|
+So because [Philipp](https://www.phschoen.de/) and I were already looking into building a keyboard with a trackball included, I decided to first get my feet wet by building a stand-alone version.
|
|
|
16
|
+
|
|
|
17
|
+<!--%
|
|
|
18
|
+lightgallery([
|
|
|
19
|
+ [ "img/trackball_v1_27.jpg", "Front of second version" ],
|
|
|
20
|
+ [ "img/trackball_v1_33.jpg", "Inside view of second version" ],
|
|
|
21
|
+ [ "img/trackball_v1_12.jpg", "First completed Trackball" ],
|
|
|
22
|
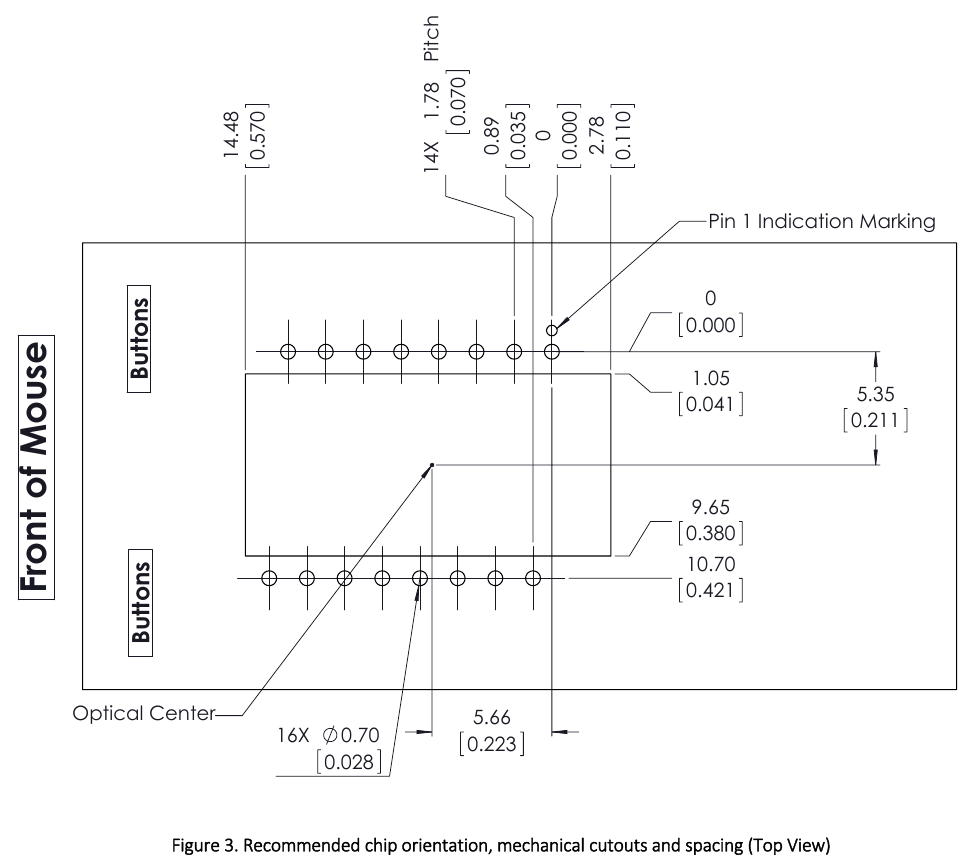
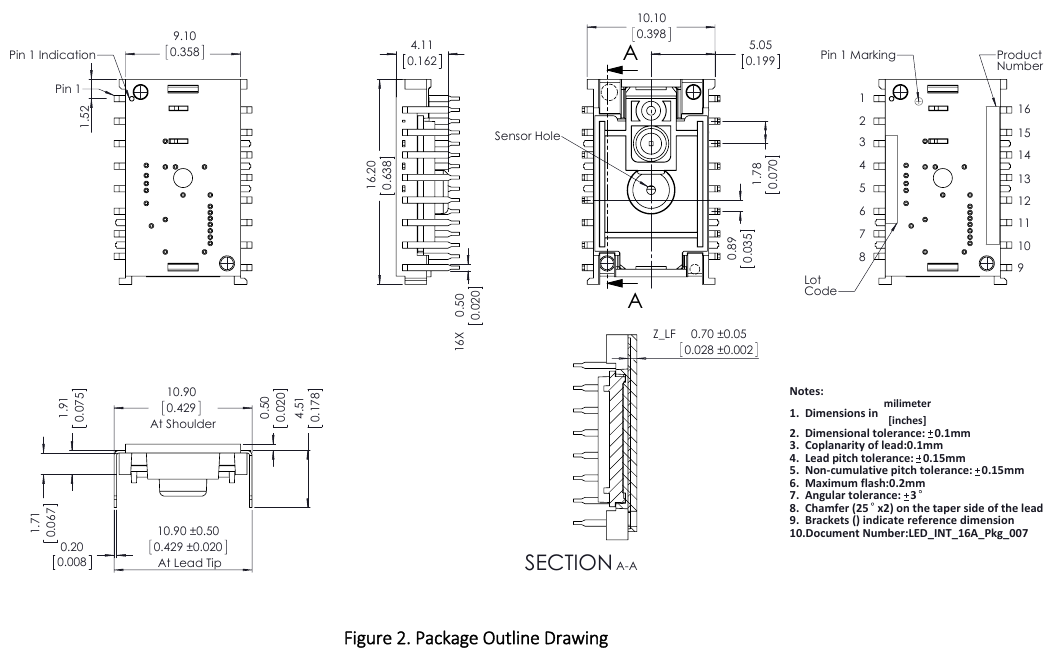
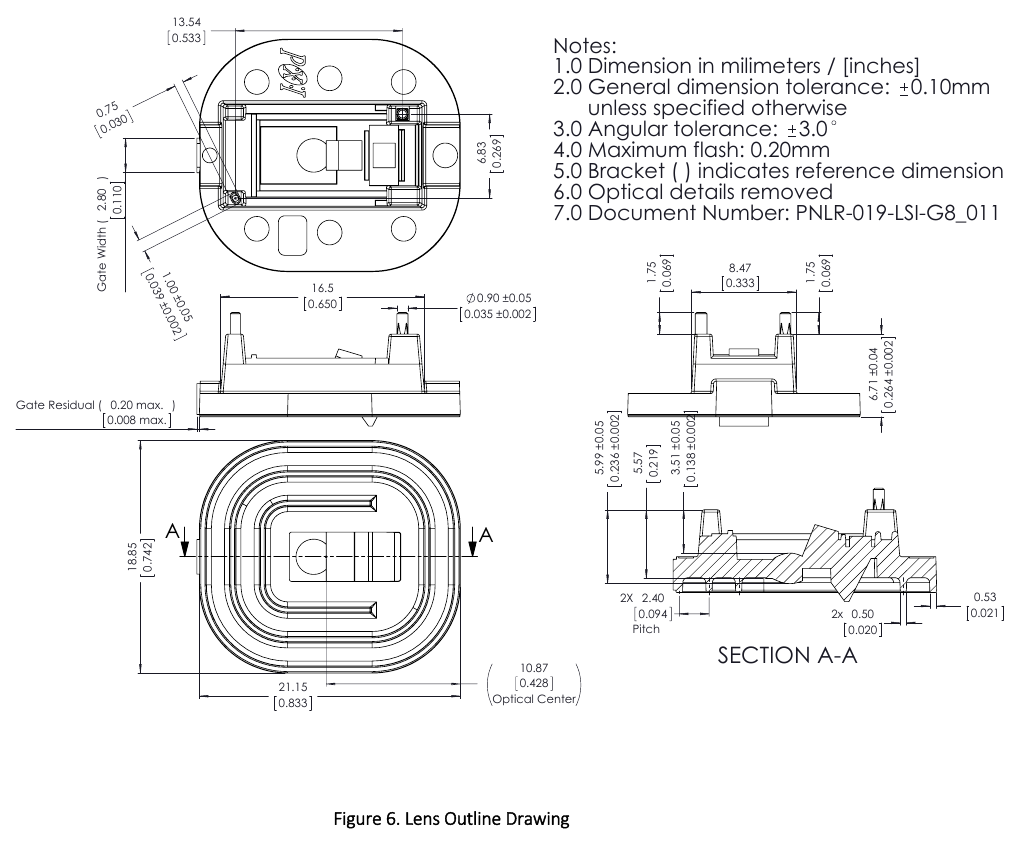
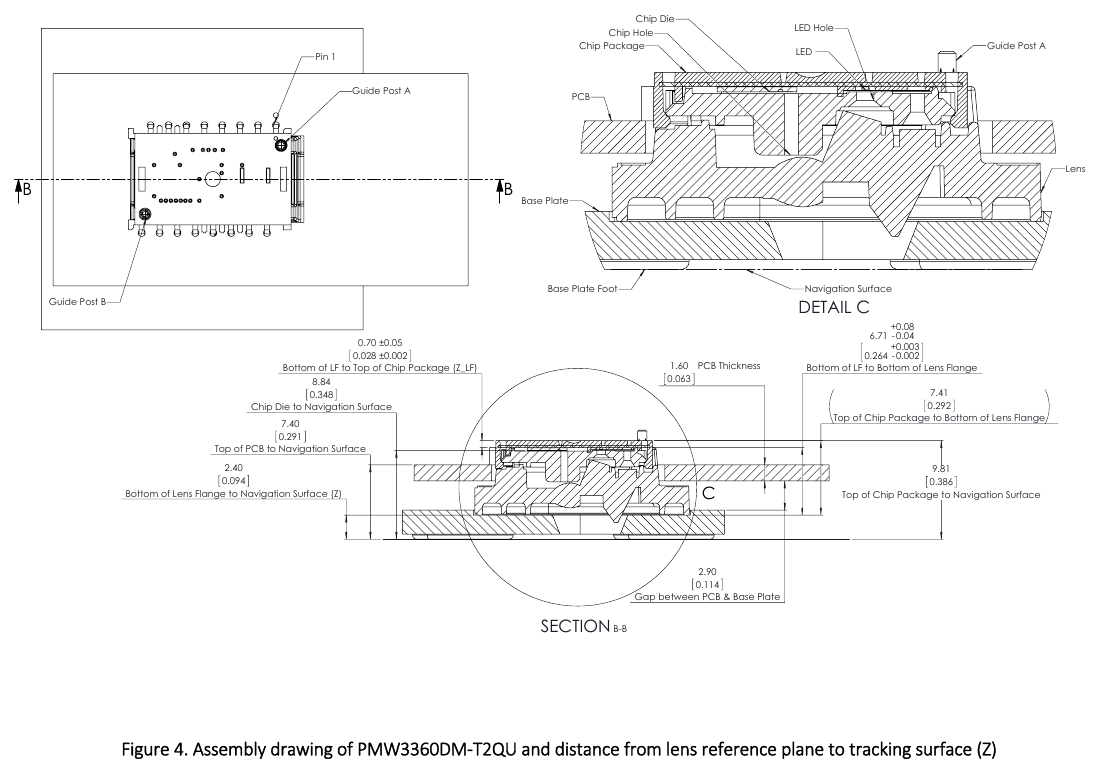
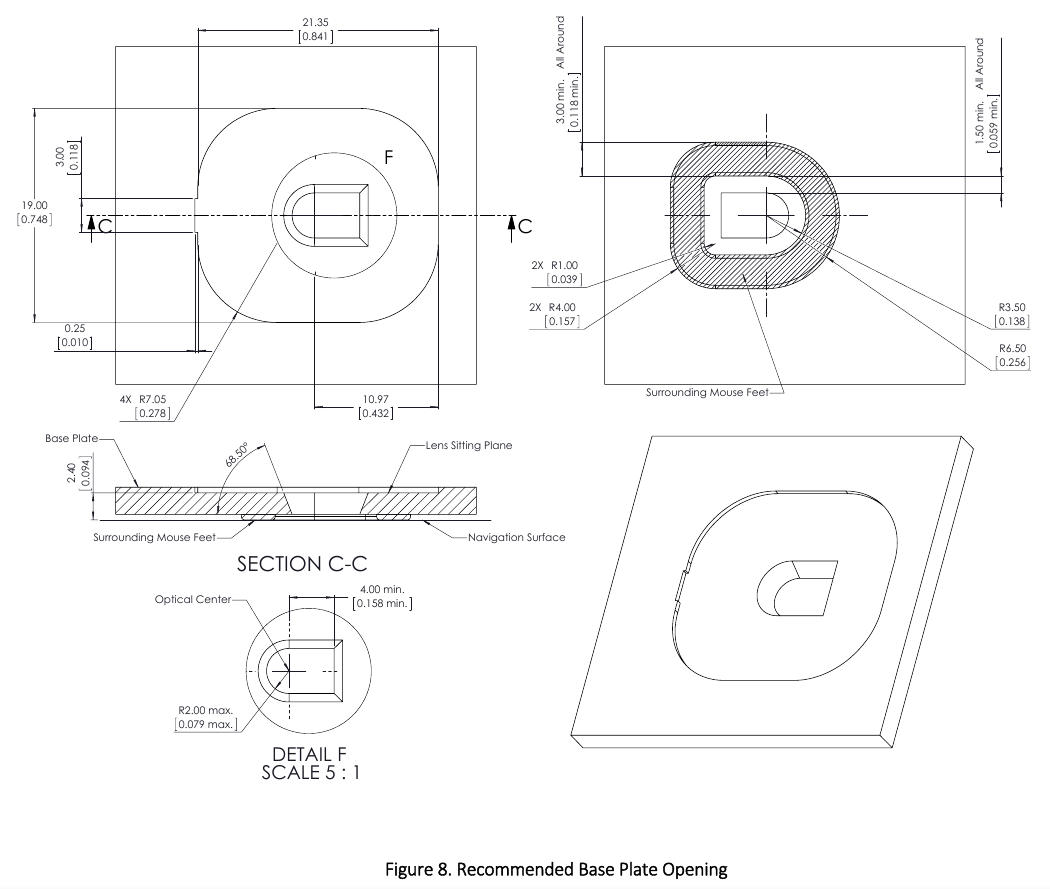
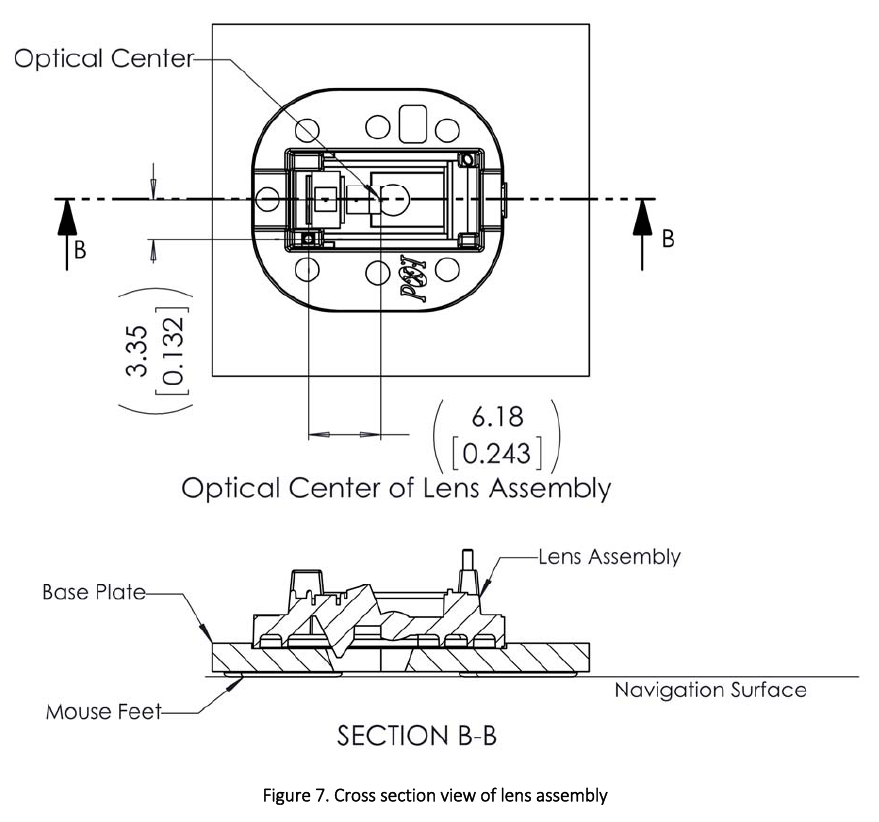
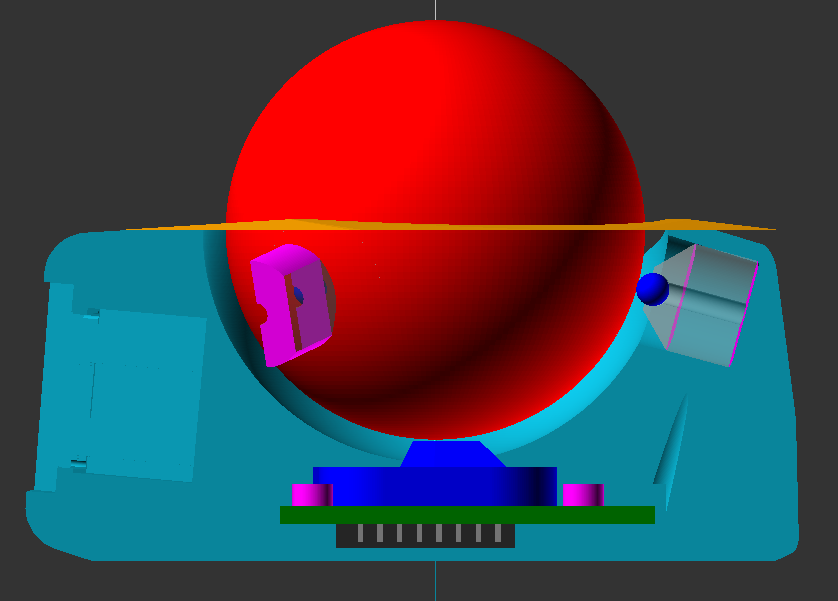
+])
|
|
|
23
|
+%-->
|
|
|
24
|
+
|
|
|
25
|
+It's made with a PMW3360 optical mouse sensor and a Raspberry Pi Pico.
|
|
|
26
|
+The case is 3D printed and was designed in OpenSCAD.
|
|
|
27
|
+
|
|
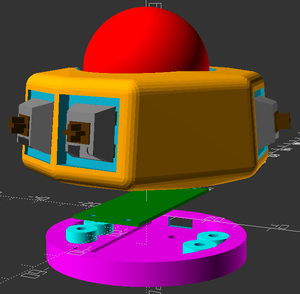
|
28
|
+<!--%
|
|
|
29
|
+lightgallery([
|
|
|
30
|
+ [ "img/trackball_scad_2.png", "Explosion drawing of assembled parts" ],
|
|
|
31
|
+ [ "img/trackball_scad_1.png", "Close up view of lens distancing and roller holder" ],
|
|
|
32
|
+])
|
|
|
33
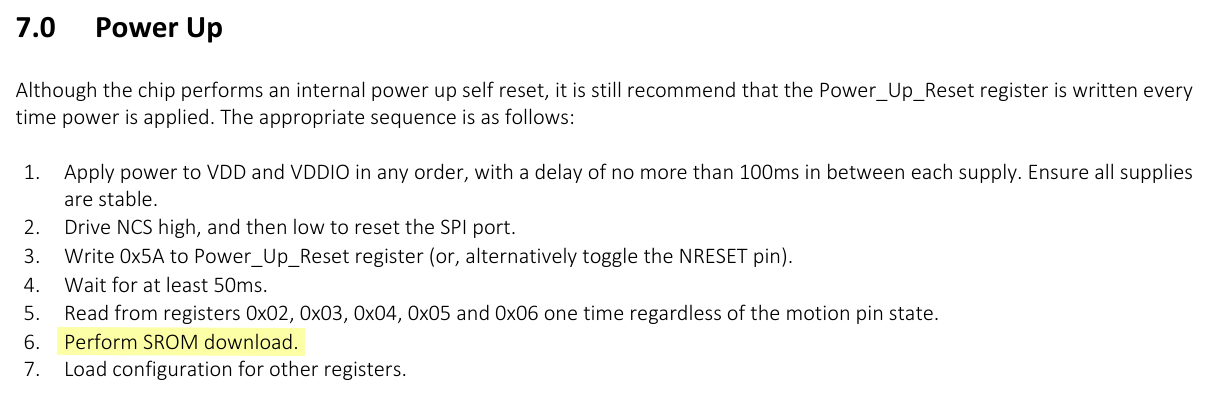
|
+%-->
|
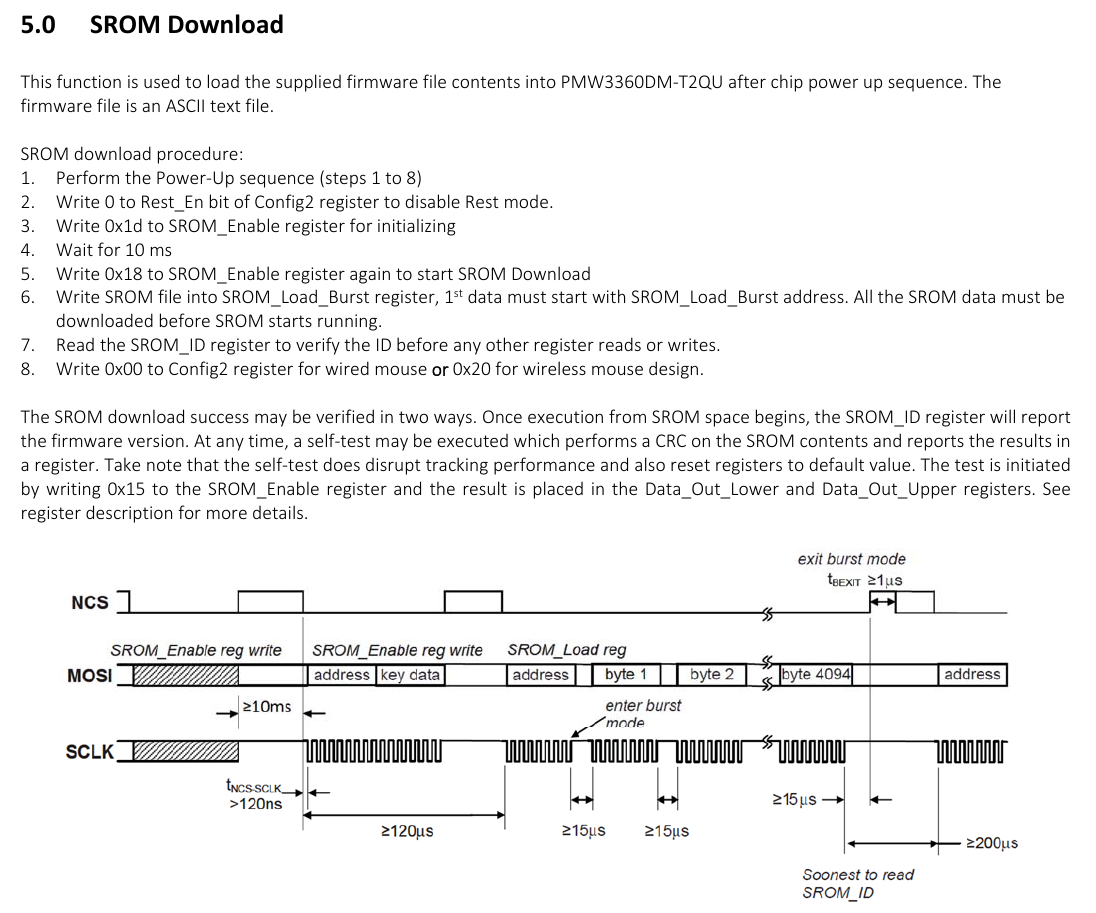
|
|
34
|
+
|
|
|
35
|
+As usual the project is released as free and open-source software / hardware.
|
|
|
36
|
+You can find everything you need to build it yourself in [the git repository](https://git.xythobuz.de/thomas/Trackball)!
|
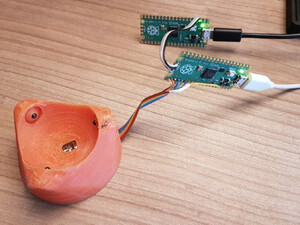
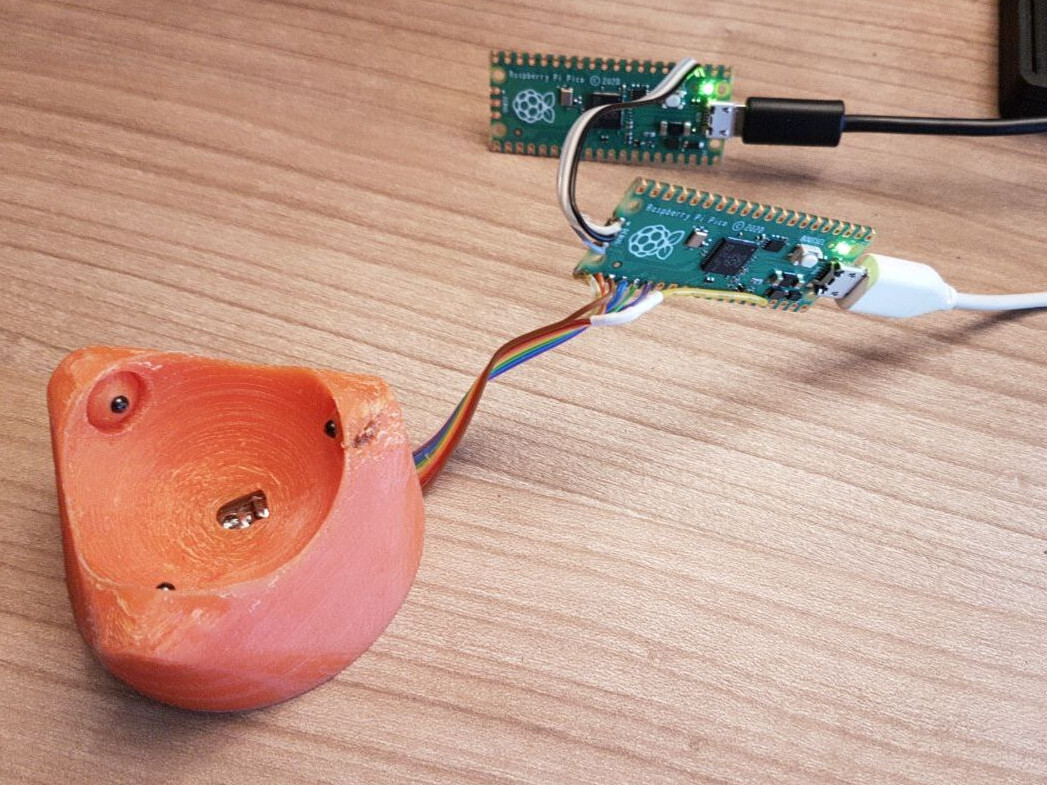
|
|
37
|
+
|
|
|
38
|
+### Table Of Contents
|
|
|
39
|
+
|
|
|
40
|
+ * [Part Selection](trackball_v1.html#part_selection)
|
|
|
41
|
+ * [3D Design](trackball_v1.html#3d_design)
|
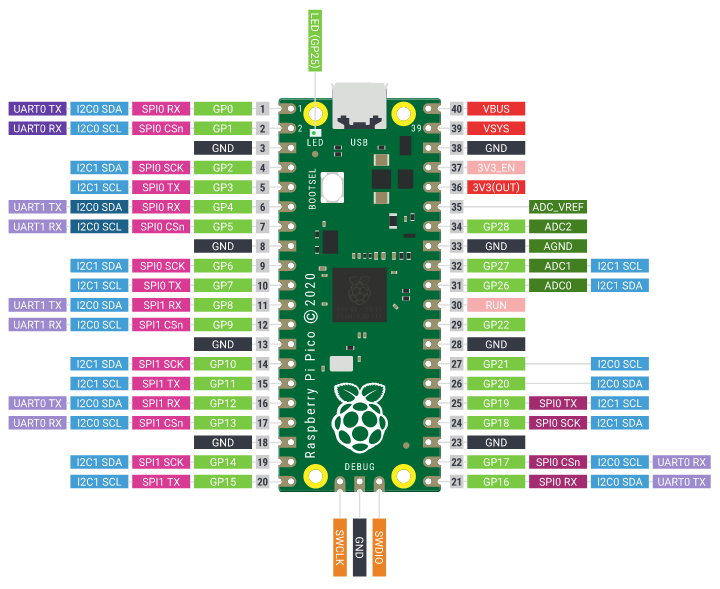
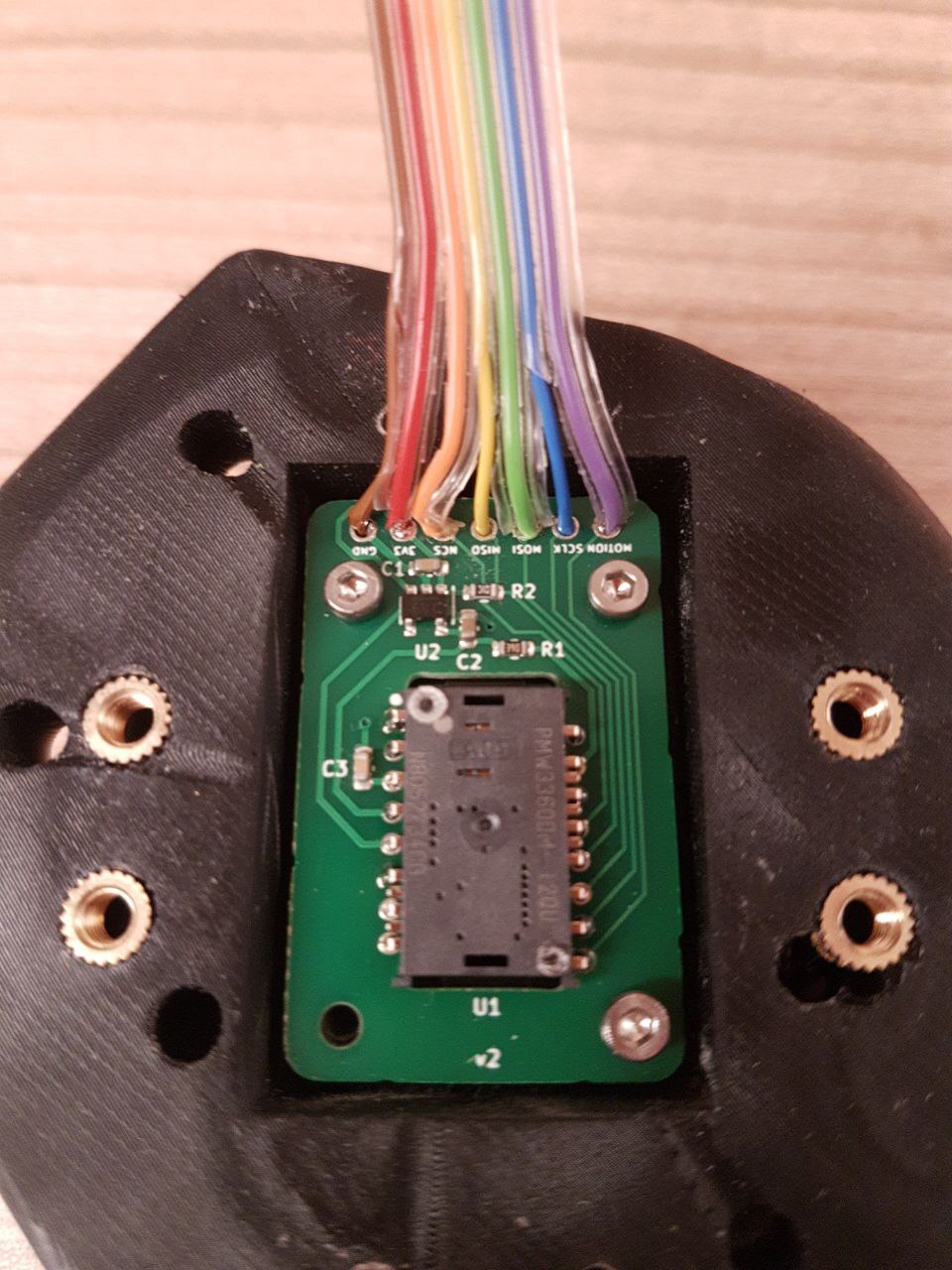
|
|
42
|
+ * [Firmware Development](trackball_v1.html#firmware_devel)
|
|
|
43
|
+ * [Wiring](trackball_v1.html#wiring)
|
|
|
44
|
+ * [Sensor Problems](trackball_v1.html#sensor_problems)
|
|
|
45
|
+ * [First Prototype](trackball_v1.html#first_prototype)
|
|
|
46
|
+ * [Improvements](trackball_v1.html#improvements)
|
|
|
47
|
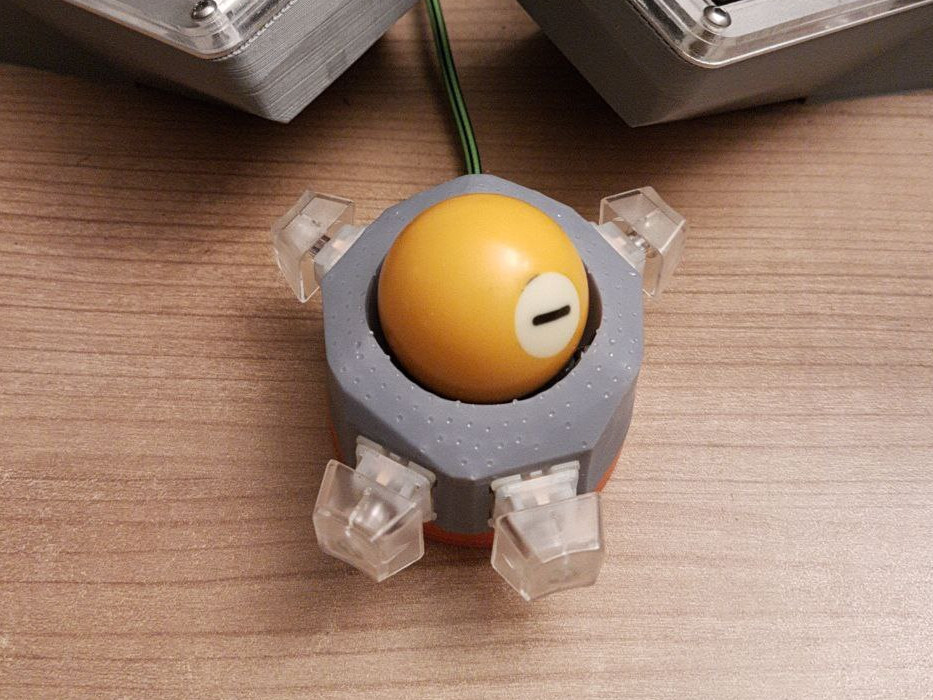
+ * [User Experience](trackball_v1.html#user_experience)
|
|
|
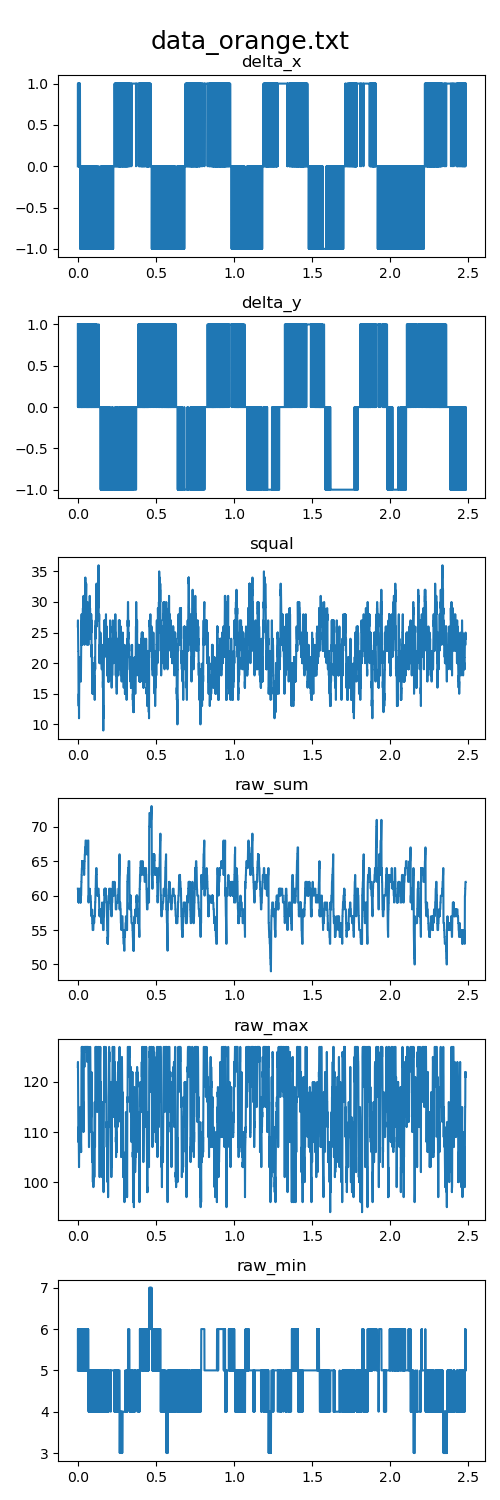
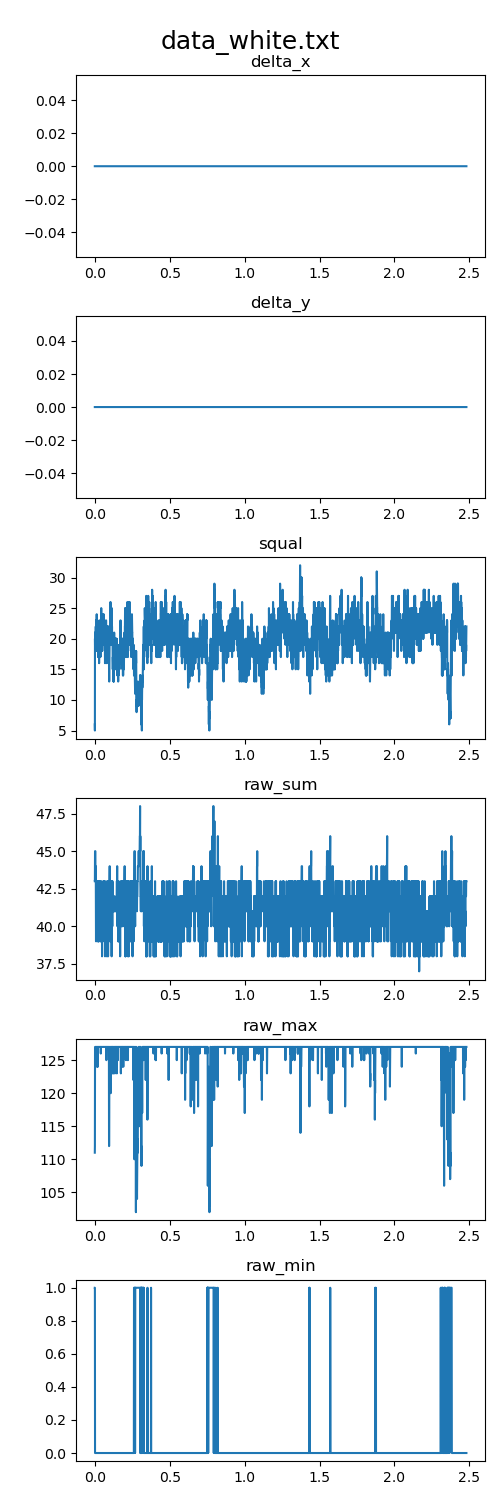
48
|
+ * [License](trackball_v1.html#license)
|
|
|
49
|
+ * [More Pictures](trackball_v1.html#more_pictures)
|
|
|
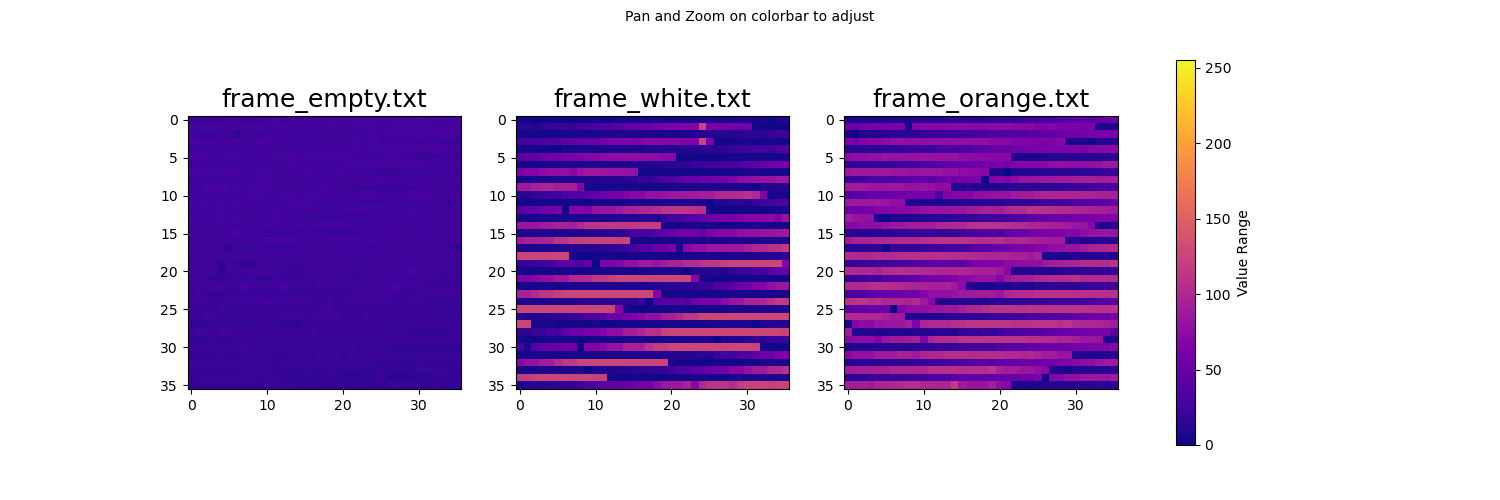
50
|
+
|
|
|
51
|
+## Part Selection
|
|
|
52
|
+<a class="anchor" name="part_selection"></a>
|
|
|
53
|
+
|
|
|
54
|
+Before embarking on this project some decisions and orders had to be made.
|
|
|
55
|
+
|
|
|
56
|
+To control everything I decided to go with the [Raspberry Pi Pico](https://www.raspberrypi.com/products/raspberry-pi-pico/) / [RP2040](https://www.raspberrypi.com/products/rp2040/) microcontroller board.
|
|
|
57
|
+It is the hot new thing on the block and I wanted to try out both the hardware and the SDK.
|
|
|
58
|
+It's also used extensively in the DIY keyboard community and already has great support in lots of open source software.
|
|
|
59
|
+
|
|
|
60
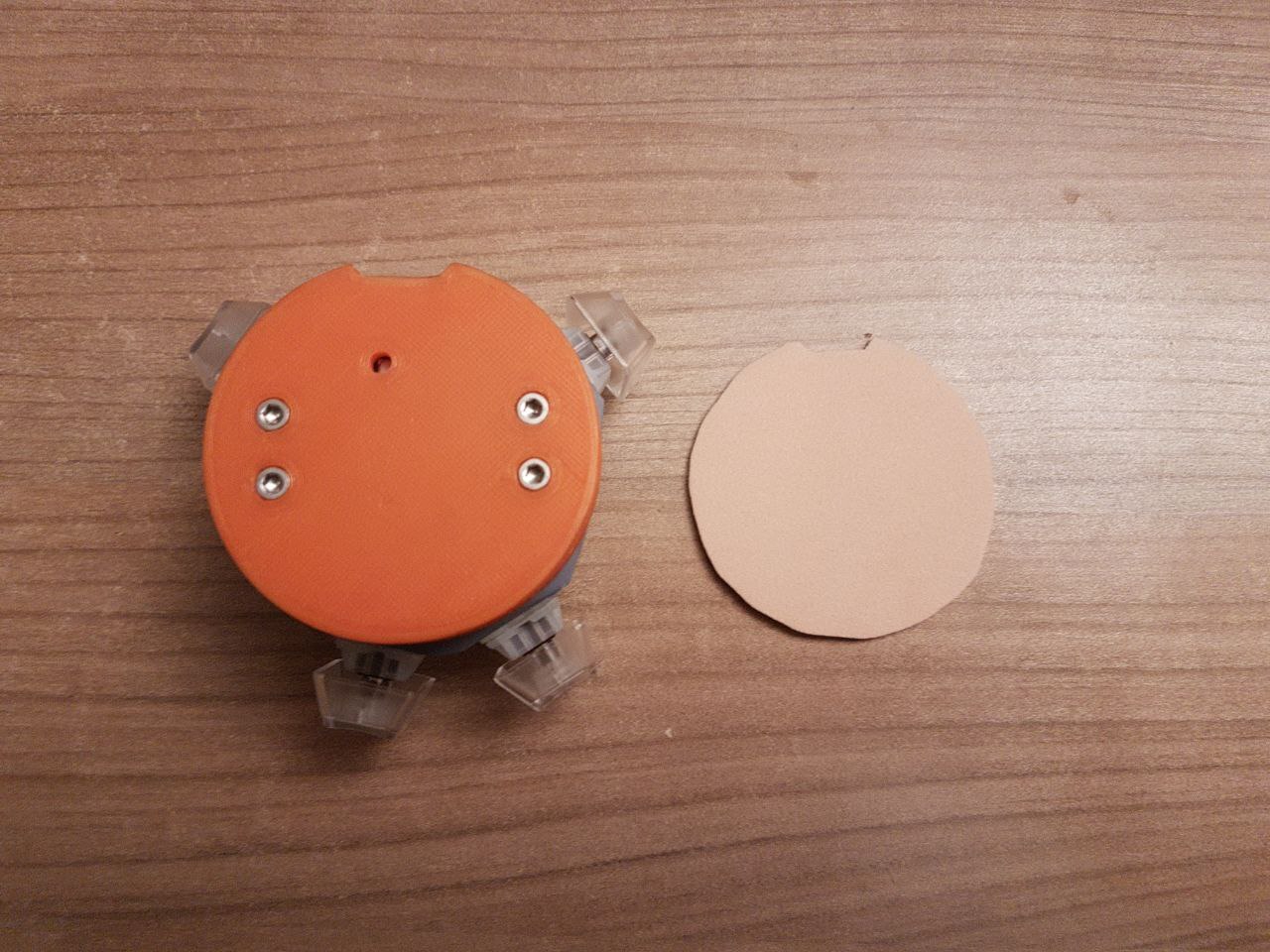
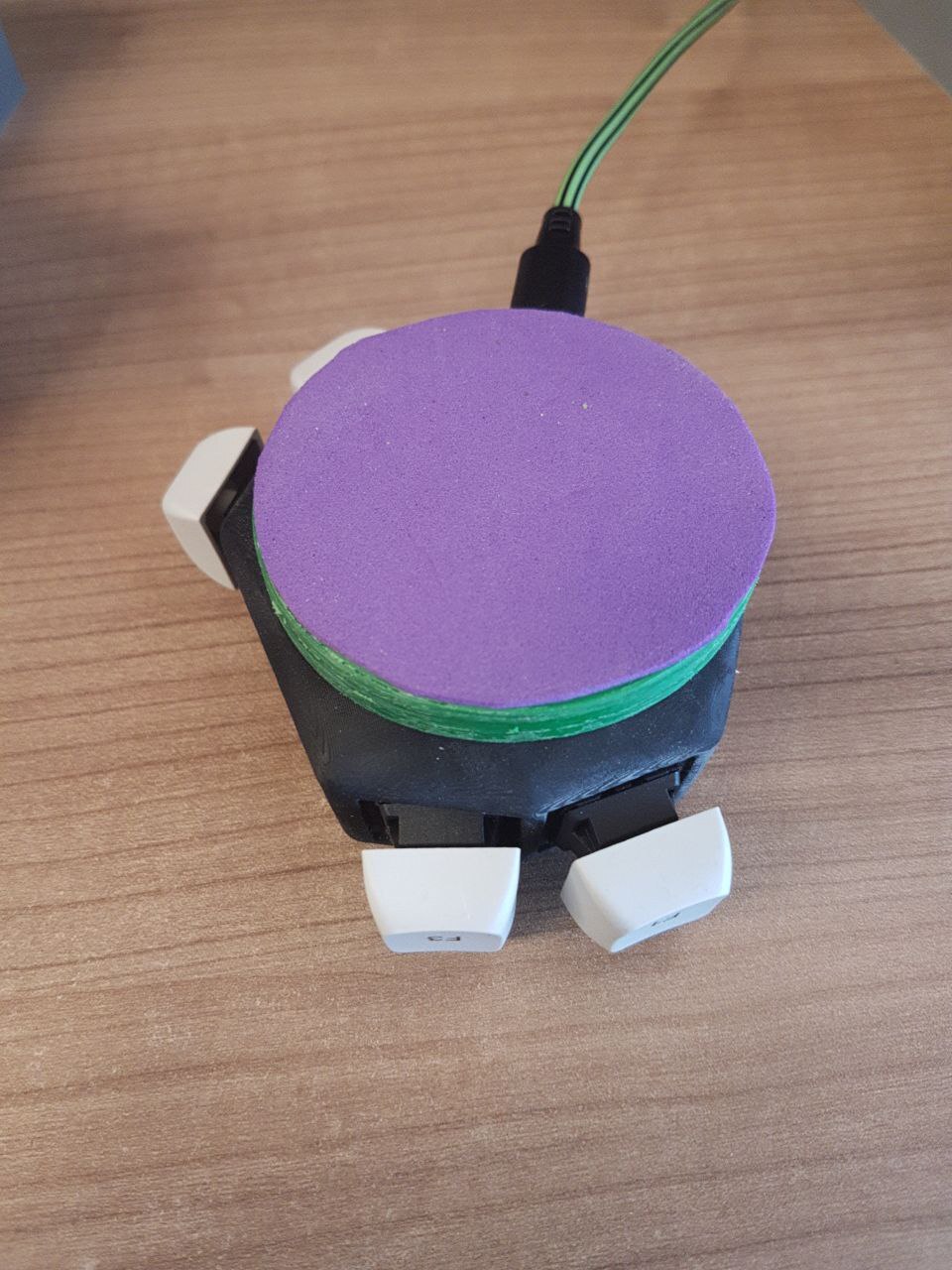
|
+Another big question was which mouse sensor to use.
|
|
|
61
|
+There are different types of sensor, either "optical" using an IR LED, or "laser".
|
|
|
62
|
+Common choices for DIY projects are the [PMW3360](https://www.tindie.com/products/jkicklighter/pmw3360-motion-sensor/) or [PMW3389](https://www.tindie.com/products/jkicklighter/pmw3389-motion-sensor/) optical sensors, or the [ADNS-9800](https://www.tindie.com/products/jkicklighter/adns-9800-laser-motion-sensor/) laser sensor.
|
|
|
63
|
+All of them are available on breakout boards from JACK Enterprises on Tindie.
|
|
|
64
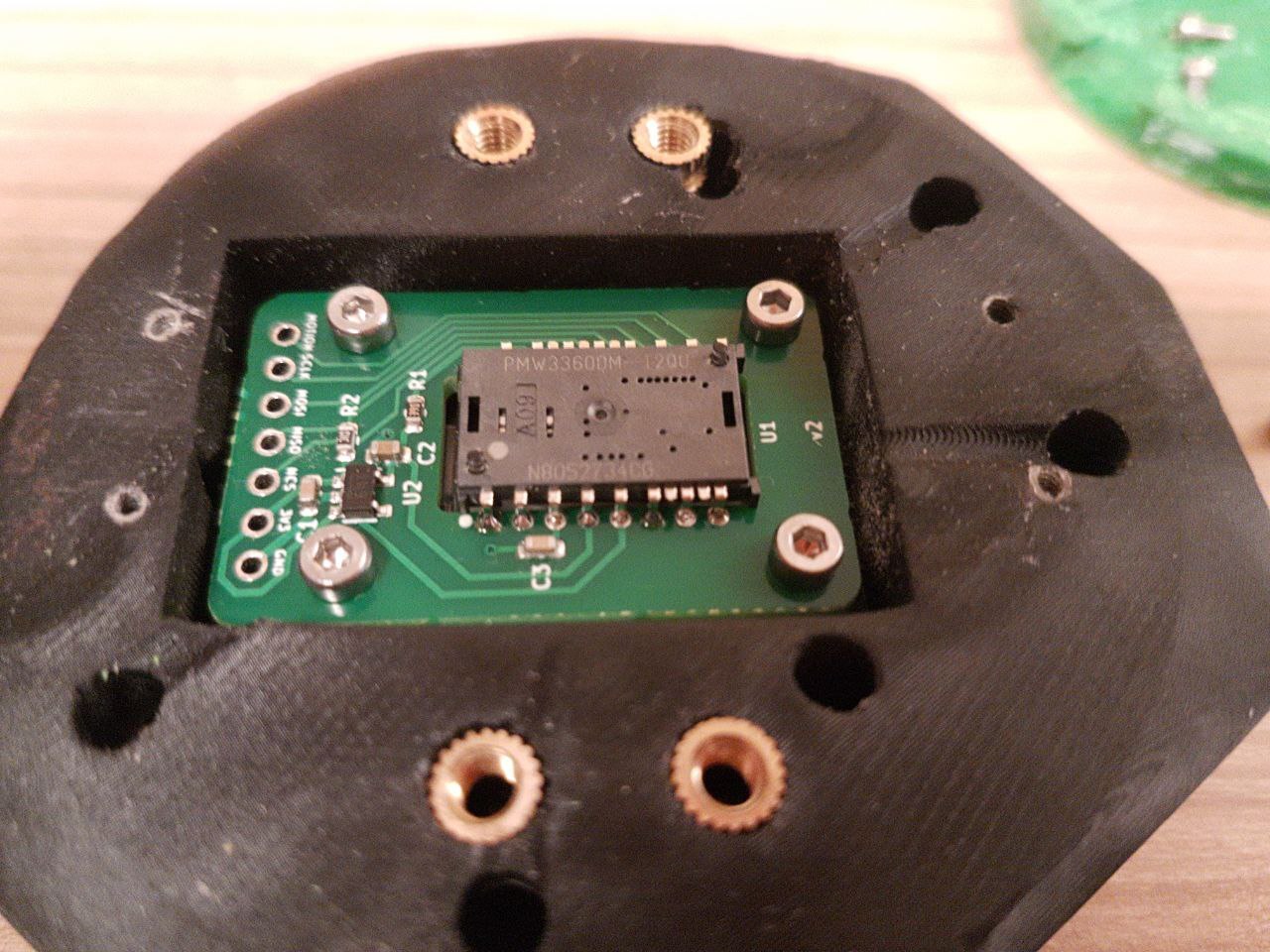
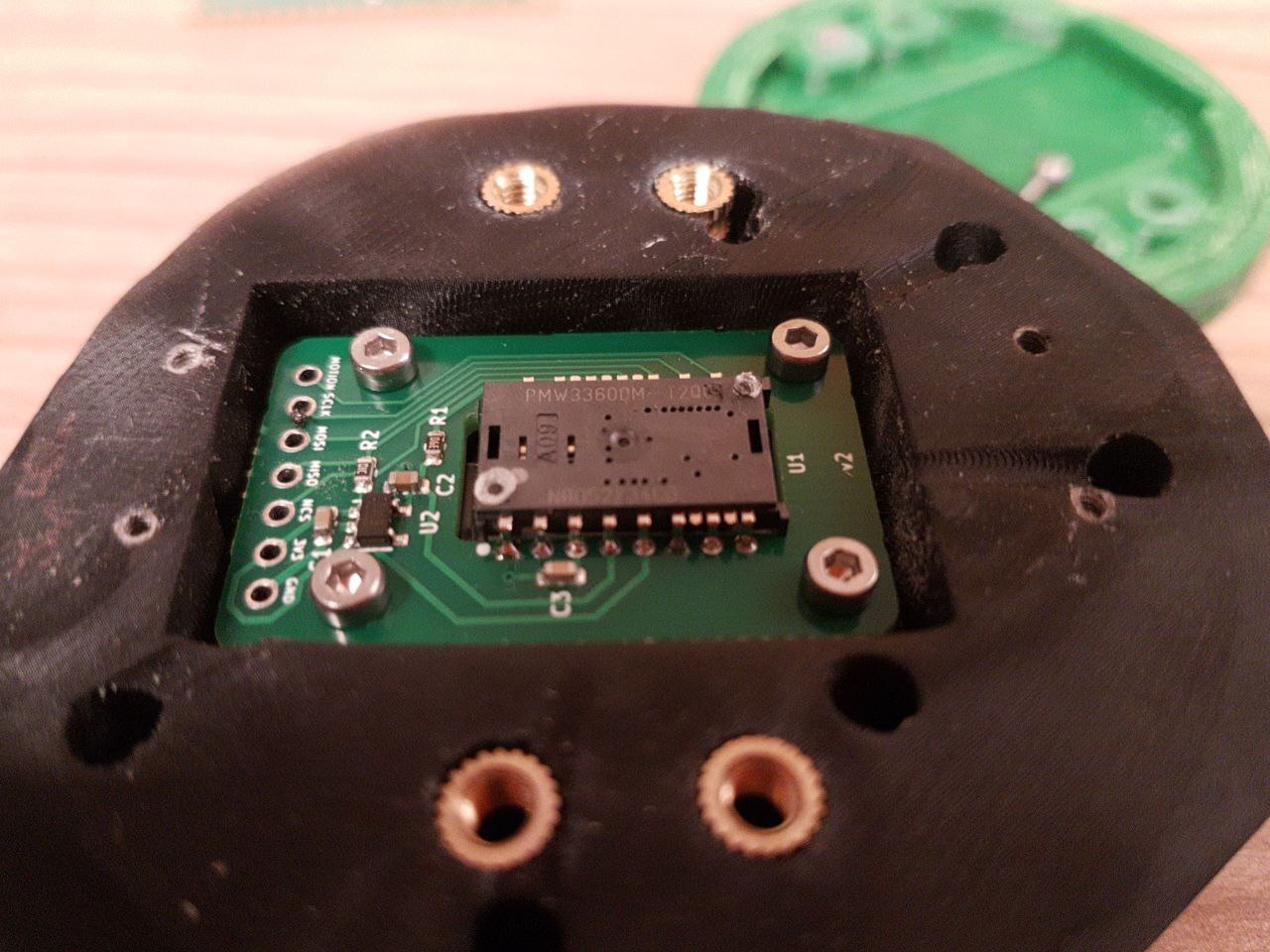
|
+Unfortunately the shipping costs to Europe are very high, so I had to find another solution.
|
|
|
65
|
+
|
|
|
66
|
+Apparently the requirements for trackballs are not as high as for gaming mouses, they are normally used with much lower resolutions.
|
|
|
67
|
+Because of this, and also because of price and availability, I decided to go for the PMW3360.
|
|
|
68
|
+The chip can be bought on [AliExpress](https://www.aliexpress.com/w/wholesale-pmw3360.html), including the lens assembly, for around 15€.
|
|
|
69
|
+
|
|
|
70
|
+To properly use it also requires some kind of breakout board with a voltage regulator, as the sensor needs ~2V supply voltage.
|
|
|
71
|
+Fortunately the IOs can be used with 3.3V devices like the RP2040.
|
|
|
72
|
+Many designs can be found [on GitHub](https://github.com/search?q=pmw3360), like ["Ogen" from JeremyBois](https://github.com/JeremyBois/Ogen) or ["PMW3360" from kbjunky](https://github.com/kbjunky/PMW3360).
|
|
|
73
|
+
|
|
|
74
|
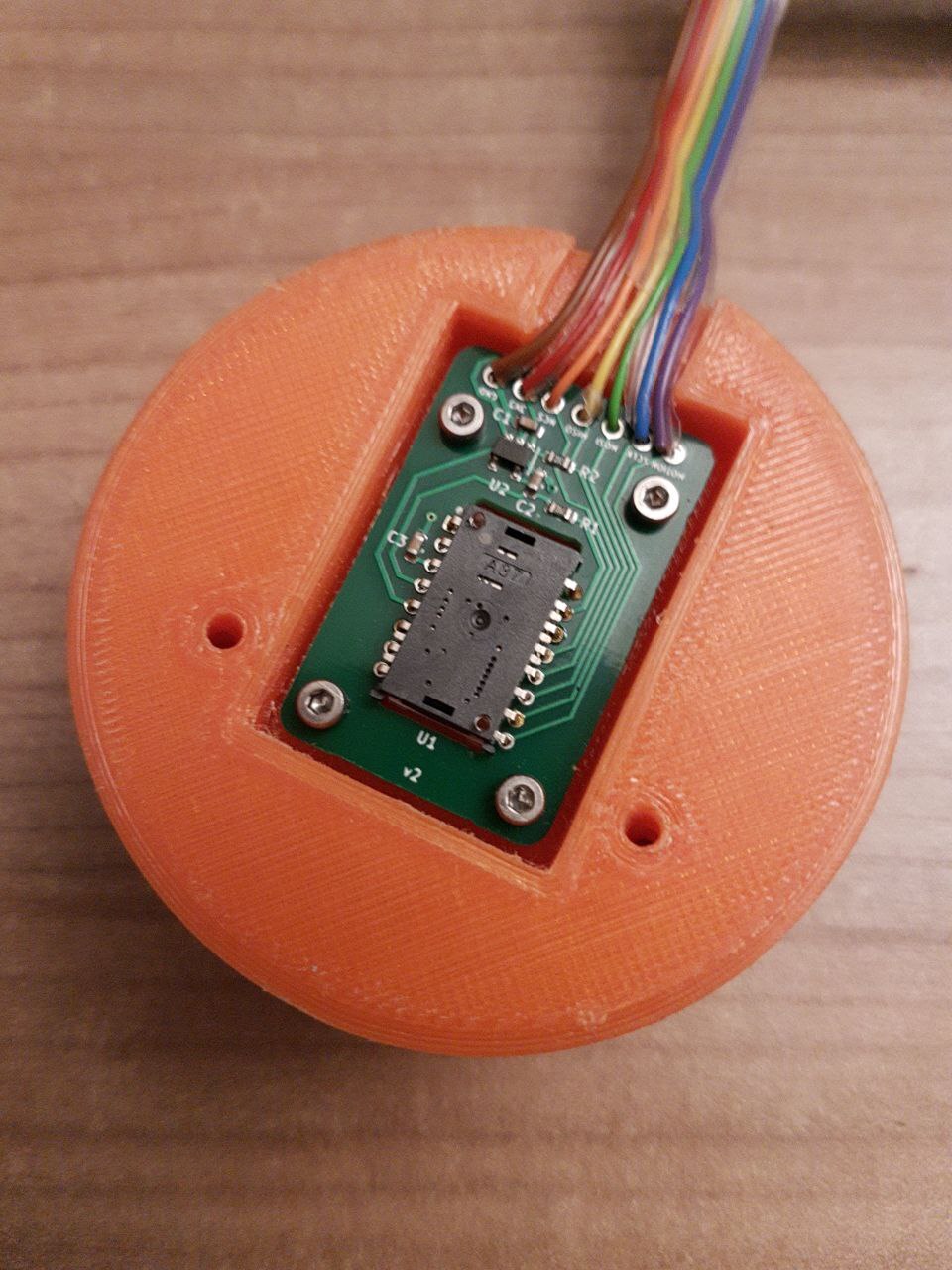
+I decided to go with ["pmw3360-breakout" by jfedor2](https://github.com/jfedor2/pmw3360-breakout).
|
|
|
75
|
+It is the most minimalistic and it also includes all required files to get the board pre-assembled from [JLCPCB](https://jlcpcb.com/).
|
|
|
76
|
+With their usual promo I got 5 boards produced and assembled for just 15.65€, including shipping.
|
|
|
77
|
+This is unbelievable to me.
|
|
|
78
|
+
|
|
|
79
|
+<!--%
|
|
|
80
|
+lightgallery([
|
|
|
81
|
+ [ "img/pmw3360_order.png", "Screenshot of JLCPCB order" ],
|
|
|
82
|
+ [ "img/pmw3360_breakout_3.jpg", "Top of PMW3360 breakout board" ],
|
|
|
83
|
+ [ "img/pmw3360_breakout_2.jpg", "Bottom of PMW3360 breakout board, with lens" ],
|
|
|
84
|
+])
|
|
|
85
|
+%-->
|
|
|
86
|
+
|
|
|
87
|
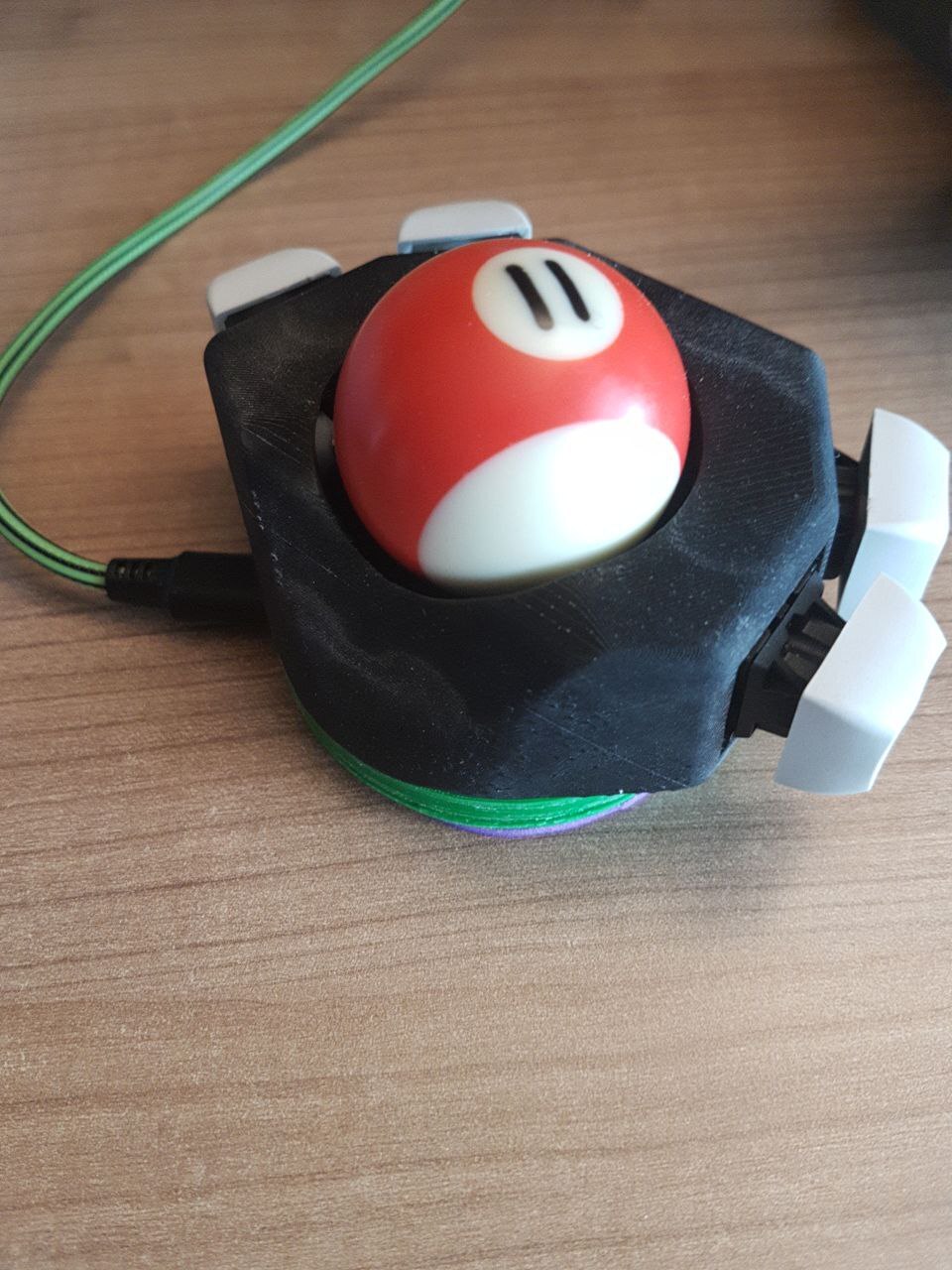
+To be able to call this a trackball, we also need some kind of ball or sphere of course.
|
|
|
88
|
+Many people go with the smallest regulation billard balls with a diameter of 38mm.
|
|
|
89
|
+These can be sourced relatively easily and are usualy flat enough, so I got some.
|
|
|
90
|
+This turned out to be a bit of a problem, however, more on that later.
|
|
|
91
|
+
|
|
|
92
|
+<!--%
|
|
|
93
|
+lightgallery([
|
|
|
94
|
+ [ "img/trackball_v1_16.jpg", "Small billard balls, case" ],
|
|
|
95
|
+ [ "img/trackball_v1_17.jpg", "Small billard balls" ],
|
|
|
96
|
+])
|
|
|
97
|
+%-->
|
|
|
98
|
+
|
|
|
99
|
+To get the ball rolling smoothly we also need some kind of mount or bearing surface.
|
|
|
100
|
+There are different options for this, nicely detailed on [Reddit](https://www.reddit.com/r/ErgoMechKeyboards/comments/yyu4ra/trackball_bearings_a_comparison_of_cheap_rollers/) and [GitHub](https://github.com/Wimads/Trackball-mousekeys-add-on-for-Skeletyl) by "Wimads".
|
|
|
101
|
+Because of this I decided to go with Si3N4 static bearing balls with a diameter of 3mm.
|
|
|
102
|
+I got 20 [from eBay](https://www.ebay.de/itm/304376943632?var=603428120198) for ~5€.
|
|
|
103
|
+
|
|
|
104
|
+For the switches I decided to go with Cherry MX keyboard switches, simply because I had them available.
|
|
|
105
|
+They are not optimal with their long key travel, I plan to change it in the future, but you also kinda get used to them.
|
|
|
106
|
+
|
|
|
107
|
+<!--%
|
|
|
108
|
+tableHelper([ "align-right", "align-right", "align-last-right", "align-right monospaced"],
|
|
|
109
|
+ [ "Part", "Count", "Description", "Cost" ], [
|
|
|
110
|
+ [ "µC", "1x", ("Raspberry Pi Pico", "https://www.raspberrypi.com/products/raspberry-pi-pico/"), "4.10€" ],
|
|
|
111
|
+ [ "Sensor", "1x", ("PMW3360 (chip and lens)", "https://www.aliexpress.com/item/4000904265601.html"), "11.83€" ],
|
|
|
112
|
+ [ "PCB", "1x", ("PMW3360 Breakout Board", "https://github.com/jfedor2/pmw3360-breakout"), "3.13€" ],
|
|
|
113
|
+ [ "Ball", "1x", ("38mm billard ball", "https://www.ebay.de/itm/222457101403"), "1.37€" ],
|
|
|
114
|
+ [ "Bearing", "3x", ("Si3N4 3mm sphere", "https://www.ebay.de/itm/304376943632?var=603428120198"), "0.72€" ],
|
|
|
115
|
+ [ "Switch", "4x", ("Cherry MX compatible", "https://www.aliexpress.com/item/1005003803920093.html"), "1.03€" ],
|
|
|
116
|
+ [ "Keycap", "4x", "From old keycap set", "0.00€" ],
|
|
|
117
|
+ [ "Insert", "4x", "M3 od=5mm l=6mm", "0.00€" ],
|
|
|
118
|
+ [ "Screw", "4x", "M3 l=8mm", "0.00€" ],
|
|
|
119
|
+ [ "Screw", "8x", "M2 l=6mm", "0.00€" ],
|
|
|
120
|
+ [ "Screw", "3x", "Grub screw M3 l>=4mm", "0.00€" ],
|
|
|
121
|
+ [ "", "", "Sum", "22.18€" ]
|
|
|
122
|
+ ]
|
|
|
123
|
+)
|
|
|
124
|
+%-->
|
|
|
125
|
+
|
|
|
126
|
+*Note*: some parts are only sold in bulk.
|
|
|
127
|
+Therefore, if you only want to build a single trackball, it will be more expensive than the sum listed above.
|
|
|
128
|
+What you see on top is the actual price I paid for the parts, reduced to the amount required for a single device.
|
|
|
129
|
+Also some parts, like screws or 3D printing materials, I consider as normal parts of a workshop, so they are not added to the cost either.
|
|
|
130
|
+
|
|
|
131
|
+## 3D Design
|
|
|
132
|
+<a class="anchor" name="3d_design"></a>
|
|
|
133
|
+
|
|
|
134
|
+The most important part of the 3D design is the mounting of the sensor and lens assembly in relation to the tracking surface, in our case the ball.
|
|
|
135
|
+The datasheet has lots of dimensional drawings which kind of hide all the important measurements somewhere in there.
|
|
|
136
|
+
|
|
|
137
|
+<!--%
|
|
|
138
|
+lightgallery([
|
|
|
139
|
+ [ "img/pmw3360_dimensions_1.png", "PMW3360 dimensional drawings, 1/6" ],
|
|
|
140
|
+ [ "img/pmw3360_dimensions_2.png", "PMW3360 dimensional drawings, 2/6" ],
|
|
|
141
|
+ [ "img/pmw3360_dimensions_3.png", "PMW3360 dimensional drawings, 3/6" ],
|
|
|
142
|
+])
|
|
|
143
|
+%-->
|
|
|
144
|
+
|
|
|
145
|
+I took great care and tried to design everything according to the specifications.
|
|
|
146
|
+
|
|
|
147
|
+<!--%
|
|
|
148
|
+lightgallery([
|
|
|
149
|
+ [ "img/pmw3360_dimensions_4.png", "PMW3360 dimensional drawings, 4/6" ],
|
|
|
150
|
+ [ "img/pmw3360_dimensions_5.png", "PMW3360 dimensional drawings, 5/6" ],
|
|
|
151
|
+ [ "img/pmw3360_dimensions_6.png", "PMW3360 dimensional drawings, 6/6" ],
|
|
|
152
|
+])
|
|
|
153
|
+%-->
|
|
|
154
|
+
|
|
|
155
|
+The static bearing balls are push-fit mounted inside the "roller holders".
|
|
|
156
|
+Printing this part is a bit tricky.
|
|
|
157
|
+Including the ball it should have a total height of 10mm.
|
|
|
158
|
+With my FDM printer it was 0.1mm too small, so I added an adjustment parameter in the design.
|
|
|
159
|
+Later iterations were always printed on SLA printers, where the adjustment had to be set back to zero.
|
|
|
160
|
+
|
|
|
161
|
+So if you want the distance to be perfect, measure the printed and assembled part and adjust accordingly.
|
|
|
162
|
+Although I think small deviations shouldn't matter too much.
|
|
|
163
|
+The sensor has a relatively large range of useable distances.
|
|
|
164
|
+
|
|
|
165
|
+<!--%
|
|
|
166
|
+lightgallery([
|
|
|
167
|
+ [ "img/trackball_scad_2.png", "Explosion drawing of assembled parts" ],
|
|
|
168
|
+ [ "img/trackball_scad_1.png", "Close up view of lens distancing and roller holder" ],
|
|
|
169
|
+])
|
|
|
170
|
+%-->
|
|
|
171
|
+
|
|
|
172
|
+The roller holders are kept in place with a grub screw for each.
|
|
|
173
|
+Then the sensor can be screwed into the top housing first, followed by the Pi.
|
|
|
174
|
+The bottom part is just a lid, without any parts screwed into it.
|
|
|
175
|
+
|
|
|
176
|
+Unfortunately the design is relatively unwieldy in OpenSCAD.
|
|
|
177
|
+Even the preview render takes dozens of seconds, with a very sluggish UI afterwards.
|
|
|
178
|
+Rendering takes ¾ of an hour on my machine.
|
|
|
179
|
+For development the `$fn` parameter can be set to a lower value.
|
|
|
180
|
+That helps somewhat.
|
|
|
181
|
+
|
|
|
182
|
+## Firmware Development
|
|
|
183
|
+<a class="anchor" name="firmware_devel"></a>
|
|
|
184
|
+
|
|
|
185
|
+Before designing and printing the complete device I made a small test bed to hold the sensor and ball.
|
|
|
186
|
+
|
|
|
187
|
+<!--%
|
|
|
188
|
+lightgallery([
|
|
|
189
|
+ [ "img/trackball_v1_1.jpg", "First sensor case prototype, with ball" ],
|
|
|
190
|
+ [ "img/trackball_v1_2.jpg", "First sensor case prototype, no ball" ],
|
|
|
191
|
+ [ "img/trackball_v1_3.jpg", "Sensor in first case prototype" ],
|
|
|
192
|
+])
|
|
|
193
|
+%-->
|
|
|
194
|
+
|
|
|
195
|
+With this initial "engineering sample" built I could continue with development of the firmware.
|
|
|
196
|
+This was basically my christmas holiday project in 2022.
|
|
|
197
|
+
|
|
|
198
|
+Interfacing with the PMW3360 chip is a bit more difficult than I initially expected.
|
|
|
199
|
+Of course everything is confidential and proprietary, but you can find [leaked datasheets on the internet](https://d3s5r33r268y59.cloudfront.net/datasheets/9604/2017-05-07-18-19-11/PMS0058-PMW3360DM-T2QU-DS-R1.50-26092016._20161202173741.pdf).
|
|
|
200
|
+It describes everything pretty well, including pinout and electrical characteristics, which were already taken care of in the breakout board.
|
|
|
201
|
+And it also describes the SPI communication interface.
|
|
|
202
|
+The only problematic part is the so-called SROM.
|
|
|
203
|
+
|
|
|
204
|
+<!--%
|
|
|
205
|
+lightgallery([
|
|
|
206
|
+ [ "img/pmw3360_datasheet_1.png", "Excerpt of PMW3360 datasheet, Power Up" ],
|
|
|
207
|
+ [ "img/pmw3360_datasheet_2.png", "Excerpt of PMW3360 datasheet, SROM Download" ],
|
|
|
208
|
+])
|
|
|
209
|
+%-->
|
|
|
210
|
+
|
|
|
211
|
+The chip requires a binary blob to be loaded on every power up, otherwise it won't work.
|
|
|
212
|
+Fortunately this was also leaked or sniffed (I'm not sure), version 4 is available [here](https://github.com/mrjohnk/PMW3360DM-T2QU/blob/master/Arduino%20Examples/PMW3360DM-polling/SROM_0x04_Arduino.ino) or [here](https://github.com/SunjunKim/PMW3360/blob/master/src/PMW3360.cpp), for example.
|
|
|
213
|
+So I've included it in my firmware as well.
|
|
|
214
|
+Not all of the fancy functionality is included in this V4 firmware blob, but it is enough for normal mouse operation.
|
|
|
215
|
+
|
|
|
216
|
+Contrary to that I'm very happy with the RP2040 / Raspberry Pi Pico ecosystem.
|
|
|
217
|
+The hardware seems well documented without having to go completely in-depth into the CPU datasheets.
|
|
|
218
|
+And the SDK similarly seems well thought-out and implemented.
|
|
|
219
|
+
|
|
|
220
|
+I was especially delighted with the ability to simply use a second Pico as a debugging dongle instead of needing an ST-Link or similar hardware.
|
|
|
221
|
+
|
|
|
222
|
+<!--%
|
|
|
223
|
+lightgallery([
|
|
|
224
|
+ [ "img/trackball_v1_4.jpg", "Debugging with two Pi Picos" ],
|
|
|
225
|
+])
|
|
|
226
|
+%-->
|
|
|
227
|
+
|
|
|
228
|
+For the USB device implementation the Pico SDK includes [TinuyUSB](https://github.com/hathach/tinyusb).
|
|
|
229
|
+From the Pico SDK I based my work on their [HID Composite example](https://github.com/raspberrypi/pico-examples/tree/master/usb/device/dev_hid_composite) ported from TinyUSB, as well as the [CDC MSC example](https://github.com/hathach/tinyusb/tree/master/examples/device/cdc_msc) directly from TinyUSB.
|
|
|
230
|
+
|
|
|
231
|
+This was very comfortable to use.
|
|
|
232
|
+From [a past project](2015_12_20_serialgamepad.html) I'm familiar with the pain of writing custom USB HID descriptors.
|
|
|
233
|
+Fortunately this is all handled by TinyUSB.
|
|
|
234
|
+You just need to pass the appropriate delta values for the mouse axes.
|
|
|
235
|
+
|
|
|
236
|
+I combined the examples to have the device act simultaneously as a human input device, and serial port and mass storage device for debugging.
|
|
|
237
|
+Of course I only developed and tested the device on my Linux machines initially.
|
|
|
238
|
+But I have now also tested it with Windows, and it works fine there as well.
|
|
|
239
|
+All functionality can be accessed without any driver installation.
|
|
|
240
|
+
|
|
|
241
|
+For the debug mass storage I also had to add some kind of file system.
|
|
|
242
|
+To do this I used [the FatFs library](https://github.com/abbrev/fatfs).
|
|
|
243
|
+I simply reserved a bunch of memory in RAM that acts as the disk device.
|
|
|
244
|
+Before it is mounted by the user, the disk is formatted and filled with the required data.
|
|
|
245
|
+Then the host can mount it and read the files.
|
|
|
246
|
+
|
|
|
247
|
+## Wiring
|
|
|
248
|
+<a class="anchor" name="wiring"></a>
|
|
|
249
|
+
|
|
|
250
|
+Wiring up the device is very easy, especially because the RP2040 provides great flexibility in its use of the GPIOs and the hardware periphery, in our case SPI.
|
|
|
251
|
+
|
|
|
252
|
+<!--%
|
|
|
253
|
+lightgallery([
|
|
|
254
|
+ [ "img/pi_pico_pinout.png", "Raspberry Pi Pico pinout" ],
|
|
|
255
|
+])
|
|
|
256
|
+%-->
|
|
|
257
|
+
|
|
|
258
|
+The SPI interface of the PMW3360 needs to be connected to one of the SPI interfaces of the Pico.
|
|
|
259
|
+But which one you use is not important and can easily be changed in the code.
|
|
|
260
|
+By default it uses the standard SPI0 pins.
|
|
|
261
|
+
|
|
|
262
|
+<div class="textwrap"><pre>
|
|
|
263
|
+GPIO 16 (pin 21) MISO -> MISO on PMW3360 board
|
|
|
264
|
+GPIO 17 (pin 22) CS -> NCS on PMW3360 board
|
|
|
265
|
+GPIO 18 (pin 24) SCK -> SCK on PMW3360 board
|
|
|
266
|
+GPIO 19 (pin 25) MOSI -> MOSI on PMW3360 board
|
|
|
267
|
+GPIO 20 (pin 26) -> MOTION on PMW3360 board
|
|
|
268
|
+ 3.3v (pin 36) -> VCC on PMW3360 board
|
|
|
269
|
+ GND (pin 38) -> GND on PMW3360 board
|
|
|
270
|
+GPIO 21 (pin 27) -> Switch (back button)
|
|
|
271
|
+GPIO 22 (pin 29) -> Switch (middle button)
|
|
|
272
|
+GPIO 26 (pin 31) -> Switch (left button)
|
|
|
273
|
+GPIO 27 (pin 32) -> Switch (right button)
|
|
|
274
|
+</pre></div>
|
|
|
275
|
+
|
|
|
276
|
+The switches use the internal pull-up resistors in the RP2040 GPIOs.
|
|
|
277
|
+So they should be wired active-low, with their common connection to GND.
|
|
|
278
|
+
|
|
|
279
|
+## Sensor Problems
|
|
|
280
|
+<a class="anchor" name="sensor_problems"></a>
|
|
|
281
|
+
|
|
|
282
|
+With the firmware mostly done I hoped to be able to use the device immediately.
|
|
|
283
|
+But it didn't quite work.
|
|
|
284
|
+When I ran my finger over the lens the sensor moved erratically, but no movement was seen with the white ball I initially tested with.
|
|
|
285
|
+Only after switching to other colors I noticed that they behave differently.
|
|
|
286
|
+So there was some investigation required.
|
|
|
287
|
+
|
|
|
288
|
+Besides the X and Y values you get a bunch of other stuff with each sensor data sample.
|
|
|
289
|
+I added functionality to dump these and made a small Python script to visualize them.
|
|
|
290
|
+
|
|
|
291
|
+<!--%
|
|
|
292
|
+lightgallery([
|
|
|
293
|
+ [ "img/pmw3360_data_white.png", "Data capture of white ball" ],
|
|
|
294
|
+ [ "img/pmw3360_data_orange.png", "Data capture of orange ball" ],
|
|
|
295
|
+])
|
|
|
296
|
+%-->
|
|
|
297
|
+
|
|
|
298
|
+With the white ball you see no movement at all, with the right ball there is movement, but there is no immediately obvious difference in the other datapoints.
|
|
|
299
|
+
|
|
|
300
|
+The PMW3360 also has a "Frame Capture" mode.
|
|
|
301
|
+This can be used to grab a full picture of what the image sensor is seeing.
|
|
|
302
|
+Using it overwrites the SROM firmware, so the sensor has to be re-initialized afterwards.
|
|
|
303
|
+I had some problems with this mode.
|
|
|
304
|
+For some reason I'm not able to properly reset the sensor after capturing a frame.
|
|
|
305
|
+It no longer reports the correct SROM ID and only a power-cycle fixes it.
|
|
|
306
|
+But the frame data can be read properly and I made a Python script to visualize it.
|
|
|
307
|
+
|
|
|
308
|
+<!--%
|
|
|
309
|
+lightgallery([
|
|
|
310
|
+ [ "img/pmw3360_frames.png", "Frame capture with no ball, white ball and orange ball" ],
|
|
|
311
|
+])
|
|
|
312
|
+%-->
|
|
|
313
|
+
|
|
|
314
|
+I'm not sure what exactly is going on with the strange lines visible in the pictures.
|
|
|
315
|
+I can't find any bug on the visualization side, but I won't rule that out fully.
|
|
|
316
|
+But like with the data visualization above, there is no obvious difference between the different colored balls.
|
|
|
317
|
+
|
|
|
318
|
+While producing some pretty pictures, this approach of analyzing the data didn't really bring us any closer to a working trackball.
|
|
|
319
|
+
|
|
|
320
|
+But then Philipp had the idea that saved the day.
|
|
|
321
|
+From the factory the PMW3360 sensors come with two small pieces of kapton tape over the optical inlet and outlet holes in the chip package.
|
|
|
322
|
+Removing them solved all issues.
|
|
|
323
|
+
|
|
|
324
|
+<!--%
|
|
|
325
|
+lightgallery([
|
|
|
326
|
+ [ "img/pmw3360_breakout_1.jpg", "Bottom of PMW3360 breakout board, without lens. Note the kapton tape which needs to be removed!" ],
|
|
|
327
|
+])
|
|
|
328
|
+%-->
|
|
|
329
|
+
|
|
|
330
|
+Now all billard balls work fine, regardless of their colour.
|
|
|
331
|
+Even the white ball works without any problems.
|
|
|
332
|
+With the electronics and the firmware ready, we could now move on to refining the mechanics.
|
|
|
333
|
+
|
|
|
334
|
+## First Prototype
|
|
|
335
|
+<a class="anchor" name="first_prototype"></a>
|
|
|
336
|
+
|
|
|
337
|
+The first top case was printed on Philipps [Anycubic Photon Mono 4K](https://www.anycubic.com/products/photon-mono-4k) SLA printer with [Anycubic Standard Resin + Grey](https://amzn.to/3RSLslf).
|
|
|
338
|
+This turned out to not be the best choice.
|
|
|
339
|
+The resin is very brittle after curing, so after pressing the switches in for the first time, and pulling on them, small parts of the print immediately broke off.
|
|
|
340
|
+So I had to super-glue the switches in place.
|
|
|
341
|
+
|
|
|
342
|
+<!--%
|
|
|
343
|
+lightgallery([
|
|
|
344
|
+ [ "img/trackball_v1_6.jpg", "Top of first case print" ],
|
|
|
345
|
+ [ "img/trackball_v1_7.jpg", "Sensor mounted inside first case print" ],
|
|
|
346
|
+ [ "img/trackball_v1_5.jpg", "Side of first case print" ],
|
|
|
347
|
+])
|
|
|
348
|
+%-->
|
|
|
349
|
+
|
|
|
350
|
+Also because it's not a thermo plastic, the heat melt inserts can not be placed in the usual way.
|
|
|
351
|
+We also used super glue for these, which worked great.
|
|
|
352
|
+
|
|
|
353
|
+<!--%
|
|
|
354
|
+lightgallery([
|
|
|
355
|
+ [ "img/trackball_v1_8.jpg", "Philipp soldering the switches" ],
|
|
|
356
|
+ [ "img/trackball_v1_9.jpg", "Front of completed first version" ],
|
|
|
357
|
+ [ "img/trackball_v1_10.jpg", "Back side of completed first version" ],
|
|
|
358
|
+])
|
|
|
359
|
+%-->
|
|
|
360
|
+
|
|
|
361
|
+The PETG printed bottom case was very slippery on a hard table surface.
|
|
|
362
|
+So I cut a piece of self-adhesive spongy rubber to the proper size and put it on the bottom.
|
|
|
363
|
+This increases friction by a fair amount, but is not yet optimal.
|
|
|
364
|
+I will have to try out some other materials.
|
|
|
365
|
+
|
|
|
366
|
+<!--%
|
|
|
367
|
+lightgallery([
|
|
|
368
|
+ [ "img/trackball_v1_13.jpg", "Before adding spongy rubber on the bottom" ],
|
|
|
369
|
+ [ "img/trackball_v1_14.jpg", "After adding spongy rubber on the bottom" ],
|
|
|
370
|
+])
|
|
|
371
|
+%-->
|
|
|
372
|
+
|
|
|
373
|
+And there we go, a finished and working trackball.
|
|
|
374
|
+
|
|
|
375
|
+<!--%
|
|
|
376
|
+lightgallery([
|
|
|
377
|
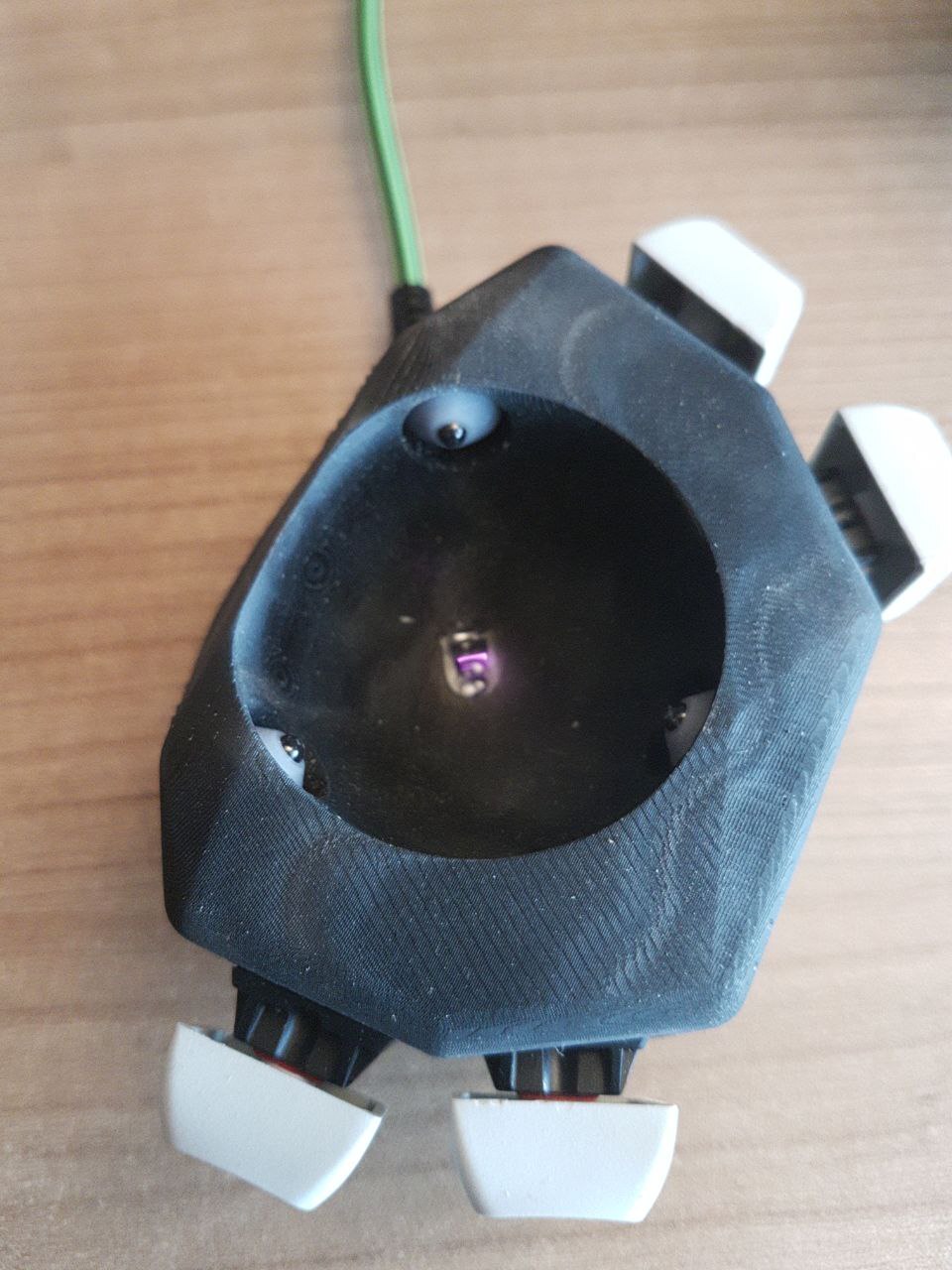
+ [ "img/trackball_v1_15.jpg", "Looking into sensor of first version" ],
|
|
|
378
|
+ [ "img/trackball_v1_11.jpg", "First completed Trackball" ],
|
|
|
379
|
+])
|
|
|
380
|
+%-->
|
|
|
381
|
+
|
|
|
382
|
+## Improvements
|
|
|
383
|
+<a class="anchor" name="improvements"></a>
|
|
|
384
|
+
|
|
|
385
|
+For the second iteration we didn't do that many changes in the 3D design.
|
|
|
386
|
+The button orientation has been overhauled.
|
|
|
387
|
+This time we sat down and actually tried to find good positions using measurements on our hands.
|
|
|
388
|
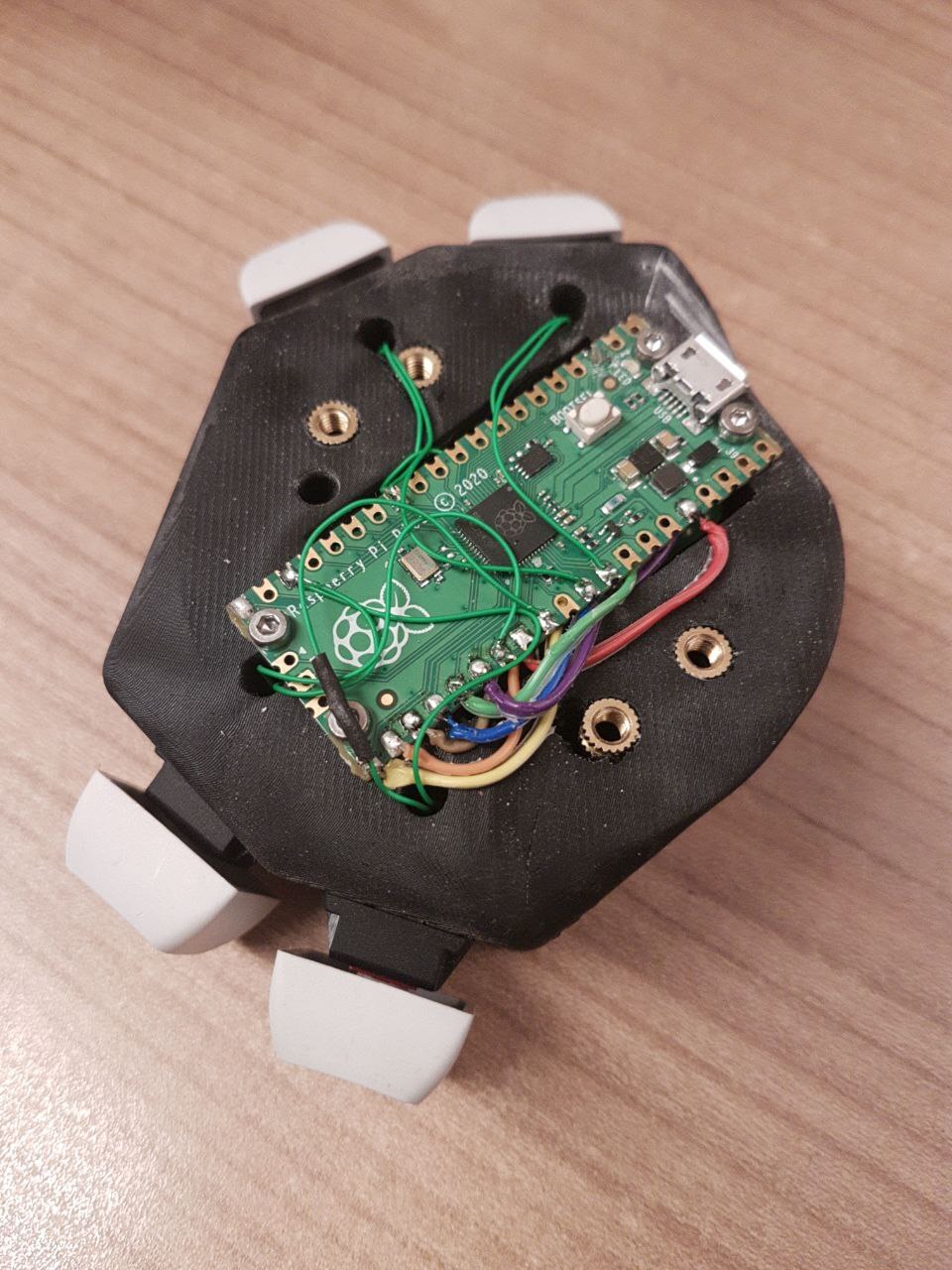
+Also the Pi Pico is no longer mounted in the bottom shell, therefore removing the need of long cables to be able to disassemble the device.
|
|
|
389
|
+
|
|
|
390
|
+This time I printed the top case on my recently acquired [Sparkmaker](sparkmaker_repair.html) SLA printer, with [Anycubic ABS-like Resin black](https://amzn.to/3Xphpmu).
|
|
|
391
|
+
|
|
|
392
|
+<!--%
|
|
|
393
|
+lightgallery([
|
|
|
394
|
+ [ "img/trackball_v1_19.jpg", "Printing the second case" ],
|
|
|
395
|
+ [ "img/trackball_v1_22.jpg", "Sensor mounted in case" ],
|
|
|
396
|
+])
|
|
|
397
|
+%-->
|
|
|
398
|
+
|
|
|
399
|
+One useful aspect of the PMW3360 lens assembly are the two mounting posts.
|
|
|
400
|
+They can be heated to firmly keep them in place.
|
|
|
401
|
+
|
|
|
402
|
+> **Recommendation**: The lens can be permanently secured to the chip package by melting the lens’ guide posts over the chip with heat staking process.
|
|
|
403
|
+Please refer to the application note *PMS0122‐LM19‐LSI‐AN* for more details.
|
|
|
404
|
+
|
|
|
405
|
+Instead of the official (confidential 🙄) method I recommend simply heating a screw or other piece of metal for 5 seconds with a lighter, then pressing it lightly on the post.
|
|
|
406
|
+Make sure everything is clean and the kapto tape removed between sensor and lens.
|
|
|
407
|
+You can see the before and after in the pictures below.
|
|
|
408
|
+
|
|
|
409
|
+<!--%
|
|
|
410
|
+lightgallery([
|
|
|
411
|
+ [ "img/trackball_v1_20.jpg", "PMW3360 before melting lens posts" ],
|
|
|
412
|
+ [ "img/trackball_v1_21.jpg", "PMW3360 after melting lens posts" ],
|
|
|
413
|
+])
|
|
|
414
|
+%-->
|
|
|
415
|
+
|
|
|
416
|
+Apart from that nothing much has changed.
|
|
|
417
|
+The heat melt inserts are still super-glued in place.
|
|
|
418
|
+
|
|
|
419
|
+<!--%
|
|
|
420
|
+lightgallery([
|
|
|
421
|
+ [ "img/trackball_v1_28.jpg", "Left side of second version" ],
|
|
|
422
|
+ [ "img/trackball_v1_33.jpg", "Inside view of second version" ],
|
|
|
423
|
+ [ "img/trackball_v1_26.jpg", "Back right of second version" ],
|
|
|
424
|
+])
|
|
|
425
|
+%-->
|
|
|
426
|
+
|
|
|
427
|
+And I used the same rubber mat for the underside.
|
|
|
428
|
+It works good enough that I didn't yet bother with a replacement.
|
|
|
429
|
+
|
|
|
430
|
+<!--%
|
|
|
431
|
+lightgallery([
|
|
|
432
|
+ [ "img/trackball_v1_24.jpg", "Looking into sensor of second version" ],
|
|
|
433
|
+ [ "img/trackball_v1_23.jpg", "Underside of second version" ],
|
|
|
434
|
+])
|
|
|
435
|
+%-->
|
|
|
436
|
+
|
|
|
437
|
+## User Experience
|
|
|
438
|
+<a class="anchor" name="user_experience"></a>
|
|
|
439
|
+
|
|
|
440
|
+I have been using these Trackballs for about six weeks at the time of this writing.
|
|
|
441
|
+From a software and electronics perspective they work absolutely fine.
|
|
|
442
|
+No disconnects, jumping cursor or any strange behaviour was observable.
|
|
|
443
|
+So I'm very happy with that.
|
|
|
444
|
+
|
|
|
445
|
+Ufortunately using them is also quite literally painful.
|
|
|
446
|
+They don't score high in terms of ergonomics, at all.
|
|
|
447
|
+The second version, with some more thought put into the placement and orientation of the switches, is an improvement, but there's still a long way to go.
|
|
|
448
|
+
|
|
|
449
|
+But using a device each day that I've built completely myself, from the grounds up in pretty much all aspects, brings me a lot of joy.
|
|
|
450
|
+I highly recommend it.
|
|
|
451
|
+
|
|
|
452
|
+## License
|
|
|
453
|
+<a class="anchor" name="license"></a>
|
|
|
454
|
+
|
|
|
455
|
+The Trackball is licensed under the [GNU General Public License](https://www.gnu.org/licenses/gpl-3.0.en.html).
|
|
|
456
|
+
|
|
|
457
|
+ This program is free software: you can redistribute it and/or modify
|
|
|
458
|
+ it under the terms of the GNU General Public License as published by
|
|
|
459
|
+ the Free Software Foundation, either version 3 of the License, or
|
|
|
460
|
+ (at your option) any later version.
|
|
|
461
|
+
|
|
|
462
|
+ This program is distributed in the hope that it will be useful,
|
|
|
463
|
+ but WITHOUT ANY WARRANTY; without even the implied warranty of
|
|
|
464
|
+ MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
|
|
|
465
|
+ GNU General Public License for more details.
|
|
|
466
|
+
|
|
|
467
|
+ See <http://www.gnu.org/licenses/>.
|
|
|
468
|
+
|
|
|
469
|
+## More Pictures
|
|
|
470
|
+<a class="anchor" name="more_pictures"></a>
|
|
|
471
|
+
|
|
|
472
|
+<div class="collapse">Some more photographs I didn't use above.</div>
|
|
|
473
|
+<div class="collapsecontent">
|
|
|
474
|
+<!--%
|
|
|
475
|
+lightgallery([
|
|
|
476
|
+ [ "img/trackball_v1_25.jpg", "Back right of second version" ],
|
|
|
477
|
+ [ "img/trackball_v1_18.jpg", "Printing the second case, badly lit" ],
|
|
|
478
|
+ [ "img/trackball_v1_29.jpg", "Second version, badly lit" ],
|
|
|
479
|
+ [ "img/trackball_v1_30.jpg", "Second version, badly lit" ],
|
|
|
480
|
+ [ "img/trackball_v1_31.jpg", "Second version, badly lit" ],
|
|
|
481
|
+ [ "img/trackball_v1_32.jpg", "Second version, badly lit" ],
|
|
|
482
|
+])
|
|
|
483
|
+%-->
|
|
|
484
|
+</div>
|

 Thomas Buck
vor 1 Jahr
Thomas Buck
vor 1 Jahr
{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}
{kind=link}